2018 International Conference on Physics, Computing and Mathematical Modeling (PCMM 2018) ISBN: 978-1-60595-549-0
Gauss Pseudospectral Method Based Trajectory Optimization for
Hypersonic Glide Vehicles
Jia-zhi GAO
1,2, Xiao-qian CHEN
1,*and Jian-ying SONG
21College of Aerospace Science and Engineering, National University of Defense Technology,
Changsha 410073, China
2
Taiyuan Satellite Launch Center, Taiyuan 030027, China
*Corresponding author
Keywords: Hypersonic glide vehicle, Pseudospectral method, Trajectory optimization.
Abstract. In order to meet the requirements of trajectory planning under complex constraints and avoid the occurrence of ballistic singularities, a set of motion models based on the idea of pole transformation is adopted, considering the influence of the earth rotation. Based on the model of pole transformation motion, the trajectory of hypersonic glide vehicle is simulated and some meaningful conclusions are obtained.
Introduction
The trajectory optimization for aircraft has always been a concern and a complex problem[1-3]. The most significant feature of glide trajectory optimization problem distinguished from other trajectory optimization problems is that hypersonic glide vehicles fly at high speed in the near-space for a long time, and the aerodynamic and thermal environment is very bad. Therefore, how to meet the aerodynamic and thermal constraints are key problems for hypersonic glide trajectory optimization. In addition, the trajectory optimization of hypersonic glider needs to consider various constraints to meet specific flight tasks. The trajectory optimization design under such many constraints is a complex problem. In order to solve this problem, based on the flight characteristics of hypersonic gliders, appropriate strategies and optimization methods should be adopted[4-5].
The trajectory optimization is actually an optimal control problem[6]. The solution can be divided into two categories: direct method and indirect method. Direct method can be further divided into direct shooting method and collocation method. Considering the complexity of the gliding trajectory optimization, the indirect method is usually difficult to meet the optimization constraints[7]. In this paper, the adaptable direct method is adopted to solve the gliding trajectory optimization. The Gauss pseudo-spectral method is a type of direct methods developed in recent years. It has been widely used in the field of flight vehicle trajectory optimization[8]. In this paper, the Gauss pseudo-spectral method is applied to optimize the trajectory of hypersonic gliding vehicle under complex constraints, and the maximum voyage optimization of CAV-H aircraft is taken as an example.
Dimensionless Pole-transformed Kinematics Model of Hypersonic Gliding Vehicles
ˆ ˆ
d sin ˆ ˆ ˆ
tan cos sin ˆ
ˆ ˆ
d cos
ˆ ˆ ˆ ˆ
d cos cos cos
ˆ ˆ ˆ
d ˆ d ˆ sin d V L V C C
t V r
L g V
C C
t V V r
V
D g C
t (1)
Among them, 2 /
g r is gravitational acceleration, is gravitational constant; L and D
represent lift and drag acceleration, respectively; rˆ is the transformed geocentric distance (the following variables are also defined in the transformed coordinate system); ˆ is the geocentric latitude; Vˆ is velocity; ˆ is the local speed angle; ˆ is the flight yaw angle; is the bank angle; C
and C are the Coriolis acceleration terms due to Earth rotation; C, C, andCV are transported
acceleration terms.
Because the magnitudes of the glider’s motion variables are very different, which are not conducive to the optimization calculation, so the dimensionless treatment must be carried out. In this paper, the geocentric distance rˆ, velocity Vˆ, time t, and Earth rotation angle e are treated as follows:
0 0 0 0 0 0 0
ˆ ˆ
ˆ
, , , e
e c
r V V t
r V t
R V g R R g g R
(2)
In the above formulas, g0 is the acceleration of gravity at the sea level, and R0 is Earth’s average
radius.
Using formulas (2), after the non-dimensional treatment of the pole-transformed kinematics model (1), we get
2
2
d sin
cos tan sin
d cos d cos cos cos d d sin d V V L C C
t r V
L V
C C
t V r V r
V D C t r
(3)
Among them, the dimensionless lift and drag acceleration are
2 0 2 0 1 ( ) 2 1 ( ) 2
c r L
c r D
L V V S C
Mg
D V V S C
Mg
(4) The cordial acceleration term and the transported acceleration term after the dimensionless treatment are expressed as following
2 2
2 2
(2 2 tan ( sin cos ))
( cos sin )
cos
2( sin cos )
[ sin sin sin cos ( ) cos ]
[ cos sin cos cos ( ) sin ]
ex ey ez
ex ey ex ez
ez ey
ex ey ex ez ey ez
V ex ey ex ez ey ez
C r C V C r C V C r (5)
(cos cos cos cos
sin cos cos sin sin sin )
( sin cos cos cos cos sin )
( cos sin cos cos
sin sin cos sin cos sin )
ex e p p
p p p
ey e p p p p
ez e p p
p p p
A A A A A A The kinematics equations after the dimensionless treatment are in the same form as the original equations, that are,
d
sin d
d cos sin
d cos
d cos cos d r V t V t r V t r
(6)
Considering the dimensionless treatment, the inequality constraints can be expressed as
0.5 max 2 max max 2 2 ( ) 1 ( ) 2 m h c c
Q K VV Q
q VV q
n L D n
(7)
Trajectory Optimization using Gauss Pseudo-spectral Method
The Gauss pseudo-spectral method uses Legendre polynomial roots as discrete points, and discrete state variables and control variables. Then Lagrange interpolation is adopted to approximate the state variables and control variables. The Gauss pseudo-spectral method converts the optimal control problem of trajectory optimization to nonlinear programming problem. In theory, the Gauss pseudo-spectral method can be used to optimize the optimal design of gliding trajectory under complex constraints.
All of the roots of the K order Legendre polynomials PK( ) are chosen as the interior collocation
points in the interval, noted as K1 K. The nodes in the K are increasing monotonically in the
[ 1,1] . Taking K as interpolating nodes, the K order Lagrange interpolation of the state variables is as follows: 0 ( ) ( ) ( ) ( ) K i i i
x X L x
(8)
In eq. (8), 0,
( )
K j i
j j i i j
L
is the Lagrange interpolation basis function. Due to the nature of Lagrange interpolation, the approximation of the state are exactly equal with the true value on the interpolation point K, that is, x( )i X( )i , i0, K.
The equations (3) and (6) are differential equations. The left sides are the derivatives of the state variables. The above state interpolation is used to approximate its differential on the collocation nodes.
0 0
( ) ( ) ( ) ( ) ( )
K K
k k i k i ki i
i i
x X L X D X
In eq.(9), k1, ,K , D K(K1) is the differential matrix, which is not related to the optimization
problem itself, but is only related to the selection of the collocation points. Dki is the differential of the
Lagrange interpolation base function:
(1 ) ( ) ( )
( )[(1 ) ( ) ( )]
( )
(1 ) ( ) 2 ( )
2[(1 ) ( ) ( )]
k K k K k k i k K i K i ki i k
k K i K i k K i K i
P P
i k
P P
D L
P P
i k
P P
(10)
In eq.(10), k,(k1, ,K) are points in the collection K.
By the above state differential approximation, the kinetic differential equation are configured on the collocation points as follows
0
0 0
( ) ( ( ), ( ), ; , ) 0 2
K
f
ki i k k f
i
t t
D X f X U t t
(11) In eq.(11), k1, ,K .
In order to ensure the consistency of the discretion, the control variables are also discreted on the collocation points.
Finally, the performance index is processed, and the Lagrange type index is discreted by Gauss quadrature formulas. The resulted performance index can be obtained as follows
0
0 0 0
1
( , , , ) ( , , ; , )
2
K f
f f i k k k f
k
t f
J X t X t g X U t t
(12)
Simulation Results and Analysis
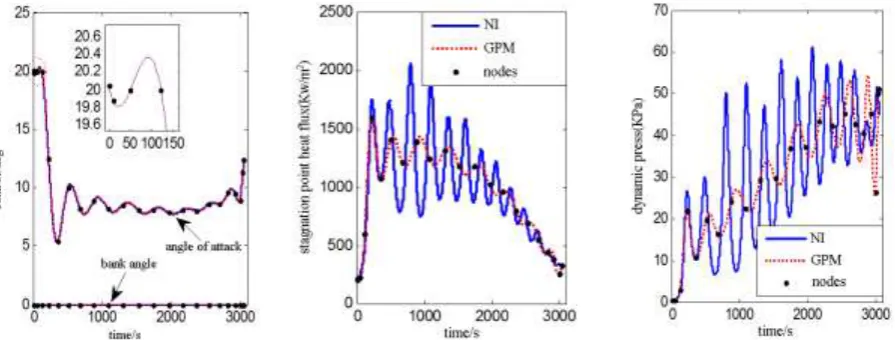
Taking the maximum range optimization of the CAV-H as an example[9], the performance index can be expressed as Jmax(f), f is the longitudinal angle at the end of the trajectory.
The range constraint of angle of attack is o o
[0 , 20 ]. The constraints of the stagnation point heat flux
Figure 1. Control of 20 nodes. Figure 2. Stagnation point heat flux of 20 nodes. Figure 3. Dynamic pressure of 20 nodes.
In order to solve the problem caused by few nodes, an intuitive idea is to increase the number of nodes. Figure 4 to figure 6 are the optimization results of 50 nodes based on the Gauss pseudo-spectral method. It can be seen that, although the accuracy of numerical integration results is greatly improved after increasing the number of nodes, but the order of Lagrange polynomials greatly increases. On the one hand, the use of high order Lagrange can reduce the efficiency of interpolation, which seriously affects the speed of optimization. On the other hand, although using the roots of Legendre polynomials can avoid the phenomenon of "Runge" to a certain extent, however, when the Lagrange order is too high, the interpolation error may increase in some areas.
[image:5.595.59.505.407.585.2]
Figure 4. Control of 50 nodes. Figure 5. Stagnation point heat flux of 50 nodes. Figure 6. Dynamic pressure of 50 nodes.
Summary
numbers of nodes are increased blindly, the amount of calculation can not only be increased, but the Runger phenomenon may appear.
References
[1]Gong-Jian Y U, Liao S Y, Yan X L, et al., HP-RPM based trajectory optimization for hypersonic glide vehicle. Flight Dynamics, 2(2017) 59-63.
[2]Garg D, Patterson M, Darby C, et al., Direct trajectory optimization and costate estimation of general optimal control problems using a radau pseudospectral method. Computational Optimization & Applications, 2(2013) 335-358.
[3]Darby C L, Hager W W, Rao A V, An hp-adaptive pseudospectral method for solving optimal control problems. Optimal Control Applications & Methods, 4(2011) 476-502.
[4]Wang L Y, Zhang Y A, Zhao G R, Improved hp-adaptive mesh refinement algorithm and its application. Journal of Ballistics, 1(2013)16-21.
[5]Wang J, Zhang G, Yang L B, et al., Trajectory optimization of SAR imaging guidance based on radau pseudospectral method. Modern Defence Technology, 5(2013)41-46.
[6]Chen Y, Liu W, A legendre-galerkin spectral method for optimal control problems governed by stokes equations. Journal of Systems Science and Complexity, 4(2011) 663-671.
[7]Yuan Y B, Zhang K, Xue X D, Optimization of glide trajectory of guided bombs using a radau pseudo-spectral method. Binggong Xuebao/acta Armamentarii, 8(2014)1179-1186.
[8]Zhang L, Gao H, Chen Z, et al., Multi-objective global optimal parafoil homing trajectory optimization via Gauss pseudospectral method. Nonlinear Dynamics, 72(2013) 1-8.