ISSN: 1992-8645 www.jatit.org E-ISSN: 1817-3195
AFRICAN BUFFALO OPTIMIZATION AND THE
RANDOM-IZED INSERTION ALGORITHM FOR THE ASYMMETRIC
TRAVELLING SALESMAN’S PROBLEMS
JULIUS BENEOLUCHI ODILI1* MOHD NIZAM MOHMAD KAHAR1, A. NORAZIAH1 3,
ESTHER ABIODUN ODILI2
1*
Research Scholar, Faculty of Computer Systems and Software Engineering, Universiti Malaysia Pahang, Kuantan, Malaysia
Senior 1Lecturer, Faculty of Computer Systems and Software Engineering, Universiti Malaysia Pahang, Kuantan, Malaysia
1, 3
Assoc. Prof Faculty of Computer Systems and Software Engineering, Universiti Malaysia Pahang, Kuantan, Malaysia
1, 3
IBM Centre of Excellence, Faculty of Computer Systems and Software Engineering, Universiti Malaysia Pahang, Kuantan, Malaysia
2
Researcher, Department Of Public Administration, Lagos State University, Ojo, Lagos, Nigeria E-mail: 1*[email protected] [email protected] 1,[email protected]
2
ABSTRACT
This paper presents a comparative study of the African Buffalo Optimization algorithm and the Random-ized Insertion Algorithm to solving the asymmetric Travelling Salesman’s Problem with the overall objec-tive of determining a better method to solving the asymmetric Travelling Salesman’s Problem instances. Our interest in the asymmetric Travelling Salesman’s Problem (ATSP) is borne out of the fact that most practical daily-life problems are asymmetric rather than symmetric. The choice of the Random Insertion Algorithm as a comparative algorithm was informed by our desire to investigate the general belief among the scientific community that Heuristics being mostly problem-dependent algorithms are more efficient that metaheuristics that are usually general-purpose algorithms. Moreover, both the metaheuristic, the African Buffalo Optimization and the Heuristic, Randomized Insertion Algorithms hold some of the best results in literature in solving the ATSP. Similarly, both methods employ different search techniques in attempting solutions to the ATSP: while the African Buffalo Optimization uses the modified Karp-Steele technique, the Randomized Insertion employs random insertion mechanism. After investigating all the 19 benchmark ATSP datasets available in TSPLIB, it was discovered that the Randomized Insertion Algorithm achieves slightly better result to the problems but the African Buffalo Optimization is much faster.
Keywords:Heuristics, Metaheuristics, Asymmetric Travelling Salesman’s Problem, Randomized Insertion Algorithm, African Buffalo Optimization.
1. INTRODUCTION
The search for better ways of doing things has led to several scientific investigations and the development of several deterministic, heuristic and metaheuristic algorithms, especially, in attempts to solve combinatorial problems [1]. Some of the de-terministic algorithms include Raphson-Newton [2], Nelder-Mead [3] and Hooke-Jeeves [4] etc. The deterministic algorithms display exceptional capacity in identifying optimal solutions, only that they get weaker, slower and less efficient as the problem space enlarges [5]. The need for the
ISSN: 1992-8645 www.jatit.org E-ISSN: 1817-3195 The major difference between the heuristics
and metaheuristics algorithms being that heuristics are generally educated guesses which exploit readi-ly available information towards solving a particu-lar problem [16] while metaheuristics are rather general-purpose algorithms designed to solve dif-ferent kinds of problems with proper tuning of the metaheuristic algorithm parameters. Moreover, metaheuristics are simply intelligent high level heuristics that operate by deliberately controlling and tuning lower level heuristic algorithms [17]. To this end, many experts claim that heuristics are more efficient than their metaheuristics counterpart [18]. This is one of the motivations for this com-parative investigation since these two algorithms: African Buffalo Optimization (ABO), a metaheu-ristic technique and the heumetaheu-ristic, Randomized In-sertion Algorithm (RAI) hold some of the best re-sults in literature with respect to providing solu-tions to the asymmetric Travelling Salesman’s Problems (ATSP).
1.1 The Travelling Salesman’s Problem
The travelling Salesman’s Problem (TSP) which is said to be one of the most studied prob-lems among combinatorial optimizations probprob-lems since its development [19, 20], basically, refers to the problem of a particular salesman who travels round a set of locations in a large community or a given set of customers locations in a number of villages/town/cities visiting his customers and re-turning to the starting location at the end of the tour using the shortest/cheapest possible route. A con-straint in this problem is that the travelling sales-man is to ensure that as much as possible, he should visit a particular location/village/town/city exactly once. The starting city which is also the ending location is the only one allowed to have double visitation. In a way, therefore, the TSP is a graph theory challenge with the cities represented as vertices and the connecting links/roads are viewed as arcs of the vertices. To make the TSP as practical as possible, the arcs are given a weighted cost which represents the travel expenses, time or distances between points j to k. Associating an arc with a cost, helps in determining the route with the cheaper cost in the graph [21].
There are, primarily, two types of TSP: asym-metric TSP and the symasym-metric TSP. In the symmet-ric TSP, the cost/distance between arcs j and k is the same as that between k and j in the whole graph. Whereas, for the asymmetric TSP, there exist, at least, an instance where the distance be-tween arcs j and k is not exactly the same
cost/distance as that between k and j. The asym-metric TSP can be represented mathematically as:
in at least one edge in the graph. (1)
Also the symmetric TSP can be represented as
(2)
Since the development of the TSP in the ear-ly 1930s, there has been several scholarear-ly investi-gations on the symmetric TSP. However, the same cannot be said of the asymmetric TSP. This is ra-ther puzzling because the asymmetric TSP finds regular applications in most practical daily-life experiences. For instance, the problem of a haulage driver on a long haul is very likely asymmetric. So also is the case of an inspectorate officer on routine inspection to a number of company locations; a post office official delivering mails to different addresses within a given geographical locations; a school bus driver picking up school children and returning them at the end of a school day; a welfare official delivering food to home-bound people; an itinerant teacher on routine tutorial visits to his students’ locations etc. [22] The most likely route-selection in solving these problems would be asymmetric. The asymmetric measurement of dis-tances has a closer relationship to real-life applica-tions as it takes cognizance of one-way traffic, spe-cial cost factors and other civil engineering consid-erations [21].
Specifically, this paper is a contribution to the ongoing investigation on determining the more efficient cum effective search system between the heuristics and metaheuristics algorithms [23, 24] by investigating the search efficiency and speed of the metaheuristic, African Buffalo Optimization algorithm and the heuristic Randomized Insertion Algorithm.
con-ISSN: 1992-8645 www.jatit.org E-ISSN: 1817-3195 clusion, acknowledgement of support for the study
and references
2. AFRICAN BUFFALO OPTIMIZATION
The African Buffalo Optimization (ABO) is a recently developed lean metaheuristic optimization algorithm [25] which was designed primarily to provide solutions to issues of delay in obtaining solutions, stagnation, the use of several parameters etc. in the existing algorithms like the Genetic Algorithm, Simulated Annealing, Ant Colony Op-timization and Particle Swarm OpOp-timizations, to mention a few.
The ABO basically simulates the two basic vocali-zations of the African buffalos in their migrant lifestyle through the African vast forests and sa-vannahs in search of lush pastures. These are the ‘maaa’ vocalizations with which the buffalos summon themselves to graze at a particular
loca-tion because it is safe, favorable and has sufficient pastures as well as the alarm ‘waaa’ communica-tion calls with which they organize themselves to explore safer or more fruitful grazing locations [26, 27].
2.1. The Basic flow of ABO
[image:3.612.92.531.348.525.2]The ABO starts by randomly initializing the buffalos, placing them to nodes/locations with-in the search space (with-in this case, the ATSP graph). Next, the animals, probabilistically, choose any closest and/or cheapest unvisited node for them to visit. This choice is influenced by the cost of the move determined solely by the available heuristic in the first move. Subsequent movements are influ-enced by the cost heuristic of such moves, the per-sonal benefit of the move to the buffalo as deter-mined by its previous experience and the overall benefit of the particular move to the entire buffalo population. Mathematically, this is represented by the democratic Equation (3) in Figure 1.
Figure 1: ABO algorithm
Moreover, the algorithm updates the buf-falos’ fitness. In this way, the algorithm determines the location of best buffalo ( ) in the herd in relation to the optimal solution. Also, each ani-mal’s personal best ( ) is determined. The buffalos keep a memory of their coordinates. If the current fitness value of a particular buffalo is superior to the prevailing , the algorithm saves it as the herd’s best location .
Simi-larly, if the current fitness of a particular buffalo is better than any in its memory, the algorithm saves it as that animal’s best ( ). At this junc-ture, if the meets the exit criteria, the al-gorithm terminates and provides the best buffalo’s
location vector as the optimal solution. If not, it goes to another iteration and repeats the process until it meets the exit criteria.
2.2. African Buffalo Optimization Solution mecha-nism for the ATSP
The basic solution steps of the ABO in solving the ATSP are:
A. Choose, according to the available heuristics, an initial city for each of the buffalos and ran-domly locate them in those cities.
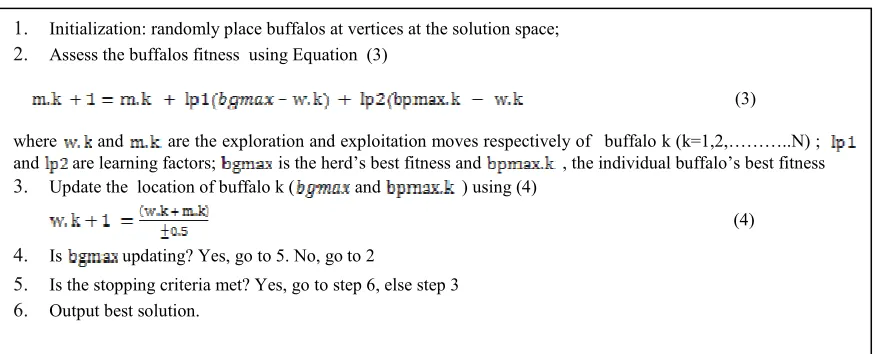
1. Initialization: randomly place buffalosat vertices at the solution space; 2. Assess the buffalos fitness using Equation (3)
(3)
where and are the exploration and exploitation moves respectively of buffalo k (k=1,2,………..N) ; and are learning factors; is the herd’s best fitness and , the individual buffalo’s best fitness
3. Update the location of buffalo k ( and ) using (4)
(4)
4. Is updating? Yes, go to 5. No, go to 2
ISSN: 1992-8645 www.jatit.org E-ISSN: 1817-3195 (5)
B. Update buffalo fitness using Equations 3 and 4, respectively.
C. Determine & .
D. Using Equation 5 and available heuristic val-ues, probabilistically construct a buffalo tour by adding cities that the buffalos have not vis-ited.
E. Confirm that the is updating? Yes, go to (F.). No, go to (A.)
F. Is the exit criteria reached? Yes, go to (G.). No, return to (B.)
G. Output the best result.
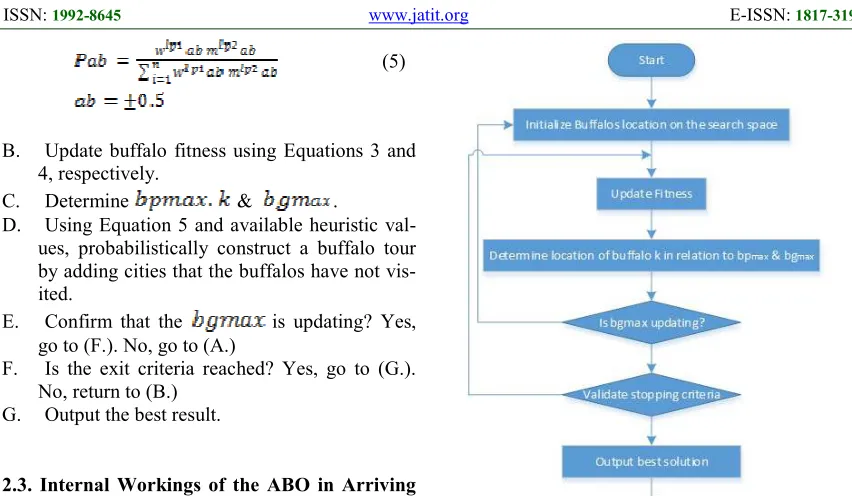
2.3.Internal Workings of the ABO in Arriving at a Solution
The ABO employs the Modified Karp Steele solution technique in its solution of the Asymmetric Travelling Salesman’s Problem [28]. This solution technique follows a simple solution steps of, firstly, constructing a cycle factor F of the cheapest weight in the K graph. Secondly, select a pair of arcs taken from different cycles of the K
graph and patch in a way that will result in a mini-mum weight. Patching is basically removing the selected arcs in the two cycle factors and then re-placing them with cheaper arcs and in this way forming a bigger cycle factor, thereby reducing the number of cycle factors in graph K by one.
Thirdly, the second step is repeated until we arrive at a single cycle factor in the entire graph
K. The African Buffalo Optimization handles the problem of delay in arriving at solutions through the use of two primary parameters to ensure speed, namely lp1 and lp2. Similarly, the algo-rithm closely monitoring the route of the
as well as ascertaining the in each construction step helps solve the problem of stag-nation and ensure efficiency. In the event that
the fails to update in a number of
[image:4.612.89.515.74.322.2]itera-tions, the ABO re-initializes the entire herd.
Figure 2: ABO flowchart
3. THE RANDOMIZED INSERTION
AL-GORITHM (RAI)
ISSN: 1992-8645 www.jatit.org E-ISSN: 1817-3195 3.1 The RAI Algorithm
The RAI algorithm is presented in Figure 3 below:
This algorithm works by generating an initial tour (See algorithm steps 1-4) and through subse-quent systematic removal and addition of arcs in the cheapest possible generates a good near-optimal or near-optimal solution.
3.2. The Internal Solution Strategy of RAI
The basic solution steps of the RAI is, firstly, randomly select two initial nodes and , then form a Cycle within the graph. Next in each subsequent construction step, randomly choose a node which is not a part of the current Cycle and insert into the Cycle in the cheapest possible way. In this way the cost of the Cycle increases mini-mally. This procedure is repeated until all the nodes are added into the tour. Then the algorithm calculates the path discovered and outputs a solu-tion.
4. EXPERIMENTS AND DISCUSSION OF RESULTS
In applying these two algorithms, the African Buffalo Optimization and the Randomized Inser-tion Algorithm to solve Asymmetric Travelling Salesman’s Problems, a number of experiments were performed on all the 19 ATSP instances as listed in the TSPLIB95. The experiments were done using a desktop computer running the Win-dows 7 O.S, Intel Core, i7-3770 CPU@ 3.4GHz, 3.4GHz, 4 GB RAM. The ATSP is coded in MATLAB programming language and ran on MATLAB 2012b Compiler. The results obtained from the experiment using African Buffalo Opti-mization were compared with the results from the Randomized Insertion Algorithm [30] and present-ed in Table 1.
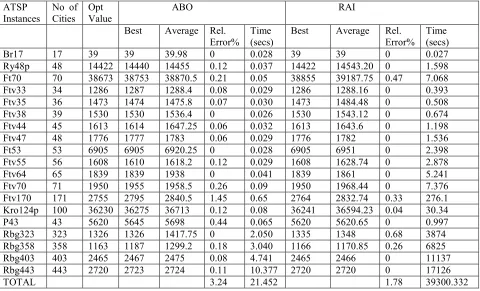
In Table 1, the first column lists the ATSP in-stances as available in TSPLIB [31], the second column indicates the number of cities represented by the ATSP instances. This is followed by the Opt Values, that is, the optimal results as listed in TSPLIB. The next two sets of columns calculates the value obtained from applying the ABO and the RAI respectively with Best = the best values ob-tained by the algorithm; Average = Average values obtained after 50 runs; Rel. Error% = percentage relative error from the optimum; and Time (secs) = the best time in seconds that the algorithm used to obtain result.
The relative error was obtained by:
(6)
As can be seen from the Table, the ABO ob-tained very good results in all instances, obtaining over 96.7% in all 19 ATSP instances under investi-gation. This is a noble feat. The RAI performed excellently well too, as can be seen in Table 1, ob-taining over 98.2% cumulative accuracy in all cas-es.
Moreover, the ABO obtained the optimal solu-tion in five instances to RAI’s 13 accurate results. The difference in performance here can be tracea-ble to their use of two different search techniques in obtaining results. While the RAI uses the ran-dom insertion method, ABO employs the modified Karp- Steele method. Whatever, it is a competitive performance.
1. Initiate tour construction with a randomly selected node and self–loop.
2. Randomly select an arc that is not in the initial tour. 3. Add this arc between neighboring arcs on the tour in the cheapest way possible. If the tour is still in-complete, return to step 2.
4. Store this tour solution as, say, Tour S.
Repeat twice in each construction step, steps 5 through 9.
5. Randomly choose and j ( Є N = {1… n}, 1 ≤ ≤ ≤ n).
6. From the circuit with all arcs, remove a path begin-ning with arc through arc , and connect arc − 1 with arc + 1.
7. Randomly choose an arc from the removed path. 8. Insert this arc between two neighboring arcs on the tour in the cheapest possible way. If the tour is still not complete, go to step 7.
9. Compare present solution with the solution S
.
Keep the better one.
ISSN: 1992-8645 www.jatit.org E-ISSN: 1817-3195
Table 1: Comparative Experimental Results
Furthermore, the cumulative relative error of the ABO (calculated by summing up the values of the relative errors) is 3.24% to RAI’s 1.78%. This is also a commendable performance by the ABO in view of the fact that the RAI is a heuristic algo-rithm and has one of the best results in literature. It is also interesting to note that the while the RAI had the biggest problem in Rbg323, the ABO obtained the optimal result there. Conversely, the ABO big-gest challenge was in Ftv170 where it recorded the highest relative error of 1.45%. Here the RAI had a relative error of just 0.33%. This, again, could be attributable to their use of different search tech-niques.
Nonetheless, the uncommon strength of the ABO comes to play when calculating the execution costs. The execution cost calculates the relative use of CPU resources in achieving results. In an in-stance-by-instance execution speed assessment, the RAI slightly outperformed the ABO in just one instance, namely, Br17 where ABO executed in 0.028 seconds to RAI’s 0.027 seconds. In all the remaining 18 instances, the algorithm of choice when speed is a factor is the ABO. In the second ATSP instance, it took ABO 0.037 seconds to
ob-tain optimal result to RAI’s 1.598 seconds: ABO here was over 43 times faster. This trend continues in all other instances. For example, in Ftv64 while RAI spent 5.241seconds to execute, the ABO used as just 0.041 seconds. Here ABO is about 127.83 times faster. Also, in the difficult ATSP instance Ftv170, it took ABO 0.65 seconds to RAI’s 276.1 seconds. This translates to ABO being over 424.76 times faster.
Similarly, the ATSP instances involving larger number of cities such as rbg323, rbg358, rbg403 and rbg403 are where the speed of ABO is even more glaring. For instance it took ABO 2.050 se-conds to obtain optimal solution to RAI’s 3874 seconds [ABO being 1889.75 faster] in rbg323; in solving rbg358, ABO used 3.040 seconds to RAI’s 6825 seconds [ABO being 2245.07 times faster]; for rbg403, ABO used 4.741 seconds to RAI’s 11137 seconds [ABO being 2349.08 times faster] and finally in rbg443, ABO spent 10.377 seconds to RAI’s 17126 seconds [ABO, again, being 1650.38 times faster].
In all, while the ABO used 21.452 seconds to solve all the 19 ATSP instances under investiga-tion, the RAI spent 39300.332 seconds.
ATSP Instances
No of Cities
Opt Value
ABO RAI
Best Average Rel. Error%
Time (secs)
Best Average Rel. Error%
Time (secs)
Br17 17 39 39 39.98 0 0.028 39 39 0 0.027
Ry48p 48 14422 14440 14455 0.12 0.037 14422 14543.20 0 1.598
Ft70 70 38673 38753 38870.5 0.21 0.05 38855 39187.75 0.47 7.068
Ftv33 34 1286 1287 1288.4 0.08 0.029 1286 1288.16 0 0.393
Ftv35 36 1473 1474 1475.8 0.07 0.030 1473 1484.48 0 0.508
Ftv38 39 1530 1530 1536.4 0 0.026 1530 1543.12 0 0.674
Ftv44 45 1613 1614 1647.25 0.06 0.032 1613 1643.6 0 1.198
Ftv47 48 1776 1777 1783 0.06 0.029 1776 1782 0 1.536
Ft53 53 6905 6905 6920.25 0 0.028 6905 6951 0 2.398
Ftv55 56 1608 1610 1618.2 0.12 0.029 1608 1628.74 0 2.878
Ftv64 65 1839 1839 1938 0 0.041 1839 1861 0 5.241
Ftv70 71 1950 1955 1958.5 0.26 0.09 1950 1968.44 0 7.376
Ftv170 171 2755 2795 2840.5 1.45 0.65 2764 2832.74 0.33 276.1
Kro124p 100 36230 36275 36713 0.12 0.08 36241 36594.23 0.04 30.34
P43 43 5620 5645 5698 0.44 0.065 5620 5620.65 0 0.997
Rbg323 323 1326 1326 1417.75 0 2.050 1335 1348 0.68 3874
Rbg358 358 1163 1187 1299.2 0.18 3.040 1166 1170.85 0.26 6825
Rbg403 403 2465 2467 2475 0.08 4.741 2465 2466 0 11137
Rbg443 443 2720 2723 2724 0.11 10.377 2720 2720 0 17126
ISSN: 1992-8645 www.jatit.org E-ISSN: 1817-3195 So cumulatively, the ABO was 1,832.012 times
faster than the RAI.
Someone may rightly say that speed is a func-tion of the CPU speed, RAM’s capacity, the pro-grammer’s expertise, the programming language of implementation and a few other factors but it should also be observed that the algorithm that uses such few parameters and has a straight-forward fitness function like the ABO will be difficult to match whenever speed is a factor [32, 29, 33, 34]. And since speed is one of the hallmarks of a good algorithm, it could be safe to say that the ABO clearly is a faster algorithm and outperforms the RAI in executing the benchmark ATSP instances in TSPLIB.
5. CONCLUSION
From the foregoing analysis and discussion of results, it is obvious that both ABO and RAI are competitive in obtaining optimal solutions to Asymmetric Travelling Salesman’s Problem in-stances. The results show that RAI slightly outper-formed the ABO in attaining optimal solutions to the ATSP cases under investigation with 98.22% accuracy to ABO’s 96.76%. Also, RAI obtained the optimal solution in 13 out of the 19 instances, with the ABO obtaining optimal solution in five instanc-es and very near optimal solution in the remaining cases. However, in terms of speed required to ob-tain results, the ABO is the dominant algorithm of choice. The ABO cumulatively was 1,832.012 times faster than the RAI. Similarly, in an instance-by-instance speed assessment, the ABO clearly outperformed the RAI in 18 out of the 19 ATSP instances under investigation. The RAI was slightly faster than the ABO only in Br17 where it executed at 0.027 seconds to ABO’s 0.028 seconds.
In conclusion, therefore, since accuracy (trust-worthiness) and efficiency are two of the four ma-jor criteria for determining a better algorithm, the other two being general applicability and ease of use [29, 35], the ABO can be adjudged a better al-gorithm than RAI since it performed creditably well in obtaining optimal or near-optimal results in all the test cases under investigation. Even though the RAI slightly outperformed the ABO here by 1.76%. ABO, being a metaheuristic algorithm should have wider applicability than the RAI which is a heuris-tic. Since speed is one of the measures of efficien-cy, it is safe to conclude that the ABO is a better algorithm in solving the benchmark ATSP instanc-es and this rinstanc-esult further validatinstanc-es the view that metaheuristics are more efficient algorithms than heuristics [36, 24]. The authors, therefore
recom-mend the comparison of the performance of ABO with other state-of-the-art algorithms in solving other optimization problems like PID tuning of AVR parameters, knapsack problem, job schedul-ing and vehicle routschedul-ing.
6. ACKNOWLEDGEMENT
The authors appreciate the anonymous review-ers for the critical review of this paper. Similarly, the authors acknowledge the support of the Faculty of Computer Systems and Software Engineering, Universiti Malaysia Pahang, Kuantan 26300, Ma-laysia for providing the conducive environment for this study under Grant 1403118. Also, our apprecia-tion to the Ministry of Higher Educaapprecia-tion, Malaysia for funding this study under Exploratory Re-search Grant 120608.
REFERENCES
[1] C. Blum and A. Roli, "Metaheuristics in combinatorial optimization: Overview and conceptual comparison," ACM Computing
Surveys (CSUR), vol. 35, pp. 268-308,
2003.
[2] S. Bisterzo, R. Gallino, O. Straniero, S. Cristallo, and F. Käppeler, "The s-process in low-metallicity stars–III. Individual analysis of CEMP-s and CEMP-s/r with asymptotic giant branch models," Monthly Notices of the Royal Astronomical Society,
vol. 422, pp. 849-884, 2012.
[3] R. Barati, "Parameter estimation of nonlinear Muskingum models using Nelder-Mead simplex algorithm," Journal
of Hydrologic Engineering, 2011.
[4] A. Rios-Coelho, W. Sacco, and N. Henderson, "A Metropolis algorithm combined with Hooke–Jeeves local search method applied to global optimization,"
Applied Mathematics and Computation,
vol. 217, pp. 843-853, 2010.
[5] A. W. Toga, K. A. Clark, P. M. Thompson, D. W. Shattuck, and J. D. Van Horn, "Mapping the human connectome,"
Neurosurgery, vol. 71, p. 1, 2012.
[6] D. Karapetyan and G. Gutin, "Lin– Kernighan heuristic adaptations for the generalized traveling salesman problem,"
European Journal of Operational
Research, vol. 208, pp. 221-232, 2011.
[7] R. Motwani and P. Raghavan, Randomized
algorithms: Chapman & Hall/CRC, 2010.
ISSN: 1992-8645 www.jatit.org E-ISSN: 1817-3195 models," Journal of Computational and
Graphical Statistics, 2012.
[9] X. He and K. M. Merz Jr, "Divide and conquer Hartree− Fock calculations on proteins," Journal of chemical theory and
computation, vol. 6, pp. 405-411, 2010.
[10] M. L. Puterman, Markov decision processes: discrete stochastic dynamic
programming: John Wiley & Sons, 2014.
[11] Y. Wang, G. Cong, G. Song, and K. Xie, "Community-based greedy algorithm for mining top-k influential nodes in mobile social networks," in Proceedings of the
16th ACM SIGKDD international
conference on Knowledge discovery and
data mining, 2010, pp. 1039-1048.
[12] M. Moradi and M. Abedini, "A combination of genetic algorithm and particle swarm optimization for optimal DG location and sizing in distribution systems," International Journal of
Electrical Power & Energy Systems, vol.
34, pp. 66-74, 2012.
[13] M. Dorigo and M. Birattari, "Ant colony optimization," in Encyclopedia of machine
learning, ed: Springer, 2010, pp. 36-39.
[14] B. Akay and D. Karaboga, "A modified artificial bee colony algorithm for real-parameter optimization," Information
Sciences, vol. 192, pp. 120-142, 2012.
[15] S. Intelligence, "Particle Swarm Optimization," MCCAFFREY,
James.[online].[cit. 2014-05-20].
Dostupné z: http://msdn. microsoft.
com/en-us/magazine/hh335067. aspx,
2013.
[16] A. Perdomo-Ortiz, S. E. Venegas-Andraca, and A. Aspuru-Guzik, "A study of heuristic guesses for adiabatic quantum computation," Quantum Information
Processing, vol. 10, pp. 33-52, 2011.
[17] X.-S. Yang, "Harmony search as a metaheuristic algorithm," in
Music-inspired harmony search algorithm, ed:
Springer, 2009, pp. 1-14.
[18] D. Pisinger and S. Ropke, "A general heuristic for vehicle routing problems,"
Computers & Operations Research, vol.
34, pp. 2403-2435, 2007.
[19] J. B. Odili, H. Deng, C. Yang, Y. Sun, M. C. d. E. Santo Ramos, M. C. G. Ramos, et al., "Application of Ant Colony Optimization to Solving the Traveling Salesman's Problem," Science Journal of
Electrical & Electronic Engineering, vol.
2013, 2013.
[20] A. Rodríguez and R. Ruiz, "The effect of asymmetry on traveling salesman problems," 2010.
[21] J. Brest and J. Zerovnik, "A heuristic for the asymmetric traveling salesman problem," in The 6th Metaheuristics
International Conference, 2005, pp.
145-150.
[22] R. Gottlieb, A. Fisher, M. Dohan, L. O'Connor, and V. Parks, "Homeward Bound: Food-related transportation strategies in low income and transit dependent communities," University of
California Transportation Center, 1996.
[23] F. Glover and M. Laguna, "Tabu search, 1997," Cited on, p. 83, 1997.
[24] F. Glover and M. Laguna, Tabu Search∗: Springer, 2013.
[25] J. B. Odili and M. N. M. Kahar, "African Buffalo Optimization (ABO): a New Meta-Heuristic Algorithm," Journal of
Advanced & Applied Sciences, vol. 03, pp.
101-106, april 2015 2015.
[26] J. B. Odili and M. N. M. Kahar, "Numerical Function Optimization Solutions Using the African Buffalo Optimization Algorithm (ABO)," British Journal of Mathematics & Computer
Science, vol. 10, pp. 1-12, 2015.
[27] J. B. Odili and M. N. Mohmad Kahar, "Solving the Traveling Salesman’s Problem Using the African Buffalo Optimization," Computational Intelligence
and Neuroscience, vol. 501, p. 929547,
2015.
[28] M. Dorigo and L. M. Gambardella, "Ant colonies for the travelling salesman problem," BioSystems, vol. 43, pp. 73-81, 1997.
[29] B. Baritompa and E. M. Hendrix, "On the investigation of stochastic global optimization algorithms," Journal of
global optimization, vol. 31, pp. 567-578,
2005.
[30] J. Brest and J. Zerovnik, "An approximation algorithm for the asymmetric traveling salesman problem,"
Ricerca operativa, vol. 28, pp. 59-67,
1999.
[31] G. Reinelt, "TSPLIB—A traveling salesman problem library," ORSA journal
ISSN: 1992-8645 www.jatit.org E-ISSN: 1817-3195 [32] P. J. Angeline, "Evolutionary optimization
versus particle swarm optimization: Philosophy and performance differences,"
in Evolutionary Programming VII, 1998,
pp. 601-610.
[33] D. Karaboga and B. Akay, "A modified artificial bee colony (ABC) algorithm for constrained optimization problems,"
Applied Soft Computing, vol. 11, pp.
3021-3031, 2011.
[34] Y. Shi and R. C. Eberhart, "Parameter selection in particle swarm optimization,"
in Evolutionary programming VII, 1998,
pp. 591-600.
[35] C. Khompatraporn, J. D. Pintér, and Z. B. Zabinsky, "Comparative assessment of algorithms and software for global optimization," Journal of global
optimization, vol. 31, pp. 613-633, 2005.
[36] G. Gigerenzer and W. Gaissmaier, "Heuristic decision making," Annual
review of psychology, vol. 62, pp.