Rochester Institute of Technology
RIT Scholar Works
Theses
Thesis/Dissertation Collections
2-1-2004
An Adaptive estimation scheme for reducing
communications in a distributed control
implementation
Aaron Burry
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion
in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact
Recommended Citation
AN ADAPTIVE ESTIMATION SCHEME FOR REDUCING
COMMUNICATIONS IN A DISTRIBUTED CONTROL
IMPLEMENTATION
By
AARON M. BURRY
A Thesis Submitted to the Faculty of the Rochester Institute of Technology in partial
fulfillment of the requirements for the degree of
MASTER OF SCIENCE
IN
ELECTRICAL ENGINEERING
Approved By
Thesis Advisor
Dr. Mark A. Hopkins
Thesis Committee
Dr. Sohail A. Dianat
Thesis Committee
Dr. Ferat Sahin
Department Head
Dr. Robert J. Bowman
DEPARlMENT OF ELECTRICAL ENGINEERING
COLLEGE OF ENGINEERING
ROCHESTER INSTITUTE OF TECHNOLOGY
ROCHESTER. NEW YORK
AN ADAPTIVE ESTIMATION SCHEME FOR REDUCING
COMMUNICATIONS IN A DISTRIBUTED CONTROL
IMPLEMENTATION
I, Aaron M. Burry, hereby grant pennission to the Wallace Library of the Rochester
Institute of Technology to reproduce my thesis in whole or in part. Any reproduction will
not be for commercial use or profit.
Abstract
This
paperexaminesthe
application of adaptive estimation and controltechniques
to
reduce
the
amount of communication requiredbetween
subsystemsin
adistributed
control
implementation.
Rather
than
require alarge
amount of communicationsto
broadcast
the
outputs orthe
states of each ofthe
subsystem nodesto
all ofthe
othernodes at
every sampling
instant,
local
estimatorsin
eachsubsystemare usedto
predictthe
state vectorsfor
all ofthe
other subsystems.These
estimates arethen
usedin
the
calculation ofthe
controller outputsfor
each ofthe
subsystems.Prior
workin
the
literature has
focused
on static estimation schemesto
achieve such reductionsin
communications.However,
such schemestypically
requirevery
accurate modelsof
the
plantin
orderto
maintainthe
desired
reductionin
communications.Poorly
modeled
dynamics
or systems whosedynamics
changeslowly
overtime
(due
to aging
ofcomponents,
changesin
plant parameters such as a robotpicking up
aheavy
object,
etc.)
can cause a substantialincrease
in the
amount of communications requiredto
maintain
the
desired
system performance.In
orderto
avoidthis,
this
paper presents an adaptive estimation and control schemefor
each subsystemin the
distributed
implementation.
The
stability
ofthe
state estimators andthe
convergence ofthe
statetracking
errorsto
withinadesired
threshold
is
proven.The
performanceofthe
systemusing
perfect communication atevery sampling
instant,
using
a static estimationscheme,
andusing the
proposed adaptive estimation scheme arethen
comparedin
Table
of
Contents
Abstract
i
Table
ofContents
ii
List
ofFigures
iv
1
Introduction
andRelated Work
1
1.1
Background
. . ... ...1
1.2
Previous Work
. .5
1.3
Overview
... . . ... .8
2
Problem Statement
andFramework
9
2.1
System
Analysis
. . ....9
2.2
Problem
Statement
...18
2.3
Distributed Control Method
... .182.4
Adaptive Estimation Method
. . .20
2.4.1
Estimator Form For
ie(l2
.21
2.4.2
Estimator Form For
xG
fi:
24
3
Controller Design
andStability
Analysis
25
3.1
No Adaptation
25
3.2
During
Adaptation
. . .26
3.2.1
Adaptive Controller
26
3.2.2
Adaptive State Estimator
33
4
Performance Metrics
36
4.1
Communication
Metric
36
5
Simulation Results
38
5.1
Spring-Mass-Damper
System
... . ....39
5.2
Nominal Plant Results
... . .41
5.3
Effect Of Threshold Values
El0
66
5.4
Comparison Of Results For
Static
andAdaptive
Estimators
66
6
Conclusions
78
List
ofReferences
79
List
of
Figures
1
Typical
Distributed
Controller
Implementation
3
2
Totally
Decentralized Controller
Implementation
... .4
3
Block
Diagram
ofthe
State
Estimation Scheme Proposed
in
[1]
7
4
Block Diagram
ofthe
ith
Subsystem
In The Partitioned Plant Model
12
5
Partitioned Controller Approach
...13
6
Block Diagram Of Plant With
Communication
20
7
Block Diagram Of Plant Without Communication
21
8
Trajectory
Of
the
System State Vector
.32
9
Spring-Mass-Damper
Plant
38
10
State
Tracking
Performance For
Constant Communication
andAdap
tation:
States
Xi
andA'2
. . . .4311
State
Tracking
Performance For Constant Communication
andAdap
tation:
States
X3
andX4
44
12
State
Tracking
Performance For Constant Communication
andAdap
tation:
States
A5
andA'6
. .45
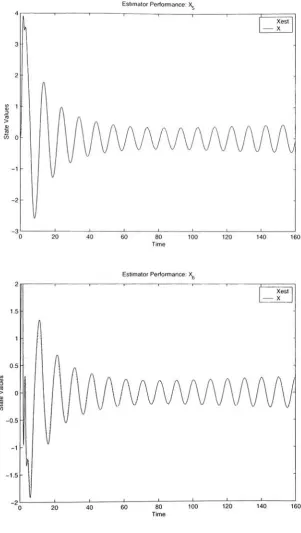
13
State Estimator Performance For Constant Communication
andAdap
tation:
States
Xi
andX2
...46
14
State Estimator Performance For Constant Communication
andAdap
tation:
States
A3
andX4
47
15
State Estimator Performance For
Constant Communication
andAdap
tation:
States
X5
andA6
. .48
16
State
Tracking
Error
History
For
Constant Communication
andAdap
tation
50
17
State
Estimator Error
History
For Each
System State
Continuous
Adaptation
51
18
Adaptive
History
ofController Parameters
Ki
and^
Continuous
19
Adaptive
History
ofState Estimator
Parameters
Acj
andTjk
Contin
uous
Adaptation
... ...53
20
State
Tracking
Performance
For
Bounded
Error Adaptation: States
A'i
and
X2
. .55
21
State
Tracking
Performance
For
Bounded
Error Adaptation:
States
A3
and
A4
.56
22
State
Tracking
Performance
For
Bounded
Error Adaptation: States
Ar5
and
A6
. . . ...57
23
State Estimator Performance
For
Bounded
Error Adaptation:
States
Xi
andA'2
. . .. . .58
24
State
Estimator
Performance
For Bounded Error Adaptation: States
A'3
andA'4
. . . ....59
25
State
Estimator
Performance
For Bounded Error
Adaptation: States
A5
andXe
... . .60
26
State
Tracking
Error
History
For Each System
State
Bounded Error
Adaptation
... .... ... ... .61
27
State
Estimator Error
History
For Each System
State
-Bounded Error
Adaptation
. . . . ... . .6228
Communications
History
For Bounded Error
Adaptation
65
29
Effect
ofChanging
the
Error Threshold Parameter
E%0
On System
Tracking
Performance
andRequired
Inter-Subsystem
Communication
67
30
Estimator
Comparison Experiment
. .68
31
Comparison
ofTracking
Error Performances For
State
X\
71
32
Comparison
ofTracking
Error Performances For
State
A2
72
33
Comparison
ofTracking
Error
Performances For
State
A3
73
34
Comparison
ofTracking
Error Performances For
State
A4
74
35
Comparison
ofTracking
Error Performances For
State
X5
75
1
Introduction
and
Related Work
1.1
Background
When
dealing
withhighly
complexproblems,
awellknown
practiceis
to
partitionthe
probleminto
smaller,
more manageable pieces.Each
ofthese
pieces canthen
be
analyzed somewhatindependently. The
solutionto these individual
problems canthen
be integrated
together
suchthat
a solutionto the
overallproblemcanbe
reached.There
aremany
otherreasons,
otherthan complexity,
for
partitioning
a probleminto
smaller sub-problems
for
analysis.Resource
allocation,
for
instance,
candictate
the
partitioning
of a probleminto
sub-problems which arethen
managedby
separateteams.
In
this case, it
is
the
desire
to
have
multipleteams
analyze portions ofthe
problem
in
parallelthat
drives
the
partitioning.This
type
ofmethodology
is
also practicedin
the
field
of control systems.The
plant
to
be
controlledis
partitionedinto
subsystems andthen
separate controllers aredesigned
andimplemented
for
each ofthese
subsystems.This
strategy
is
referredto
asdistributed
control.In
centralized controllerimplementations,
all ofthe
requiredsig
nals
(feedback
from
outputsensors,
statefeedback
signals,
and referenceinputs)
arerouted
to
a singlelocation.
The
controlleris
designed
based
onfull knowledge
ofthe
required signals and
implemented
atthe
centrallocation
wherethese
signalshave been
routed.
In
contrast,
adistributed
controlimplementation
placesthe
decision-making
and computation of
the
controllerinto
the
subsystemsthemselves.
In
addition,
in
adistributed
controlimplementation the
local
subsystem controllerstypically
do
nothave
accessto
all ofthe
outputs nor all ofthe
states ofthe
other subsystems at eachsampling instant.
This
meansthat
the
subsystemcontrollers mustbase
their
decision
making
and control actions on a morelimited
set ofinformation
than
in
acentralizedimplementation.
The
amount of non-localinformation
requiredby
each subsystemcontroller
is determined
by
avariety
offactors,
including: the
dynamics
ofthe plant,
the
chosenpartitioning
ofthe
plantinto
subsystems,
andthe
design
ofthe
subsystemachieve
the
desired
system performanceis
part ofthe
design
of adistributed
controlsystem.
The
amount of communication at eachsampling
instant
that
is
supportedby
the
implementation
canvary
from full
stateor outputcommunication(essentially
centralized
controlimplemented
over a communicationsnetwork)
to
no communicationat all
(totally
decentralized
control).A block
diagram
of atypical
distributed
controllerimplementation
is
presentedin
Figure
1.
In
this
figure,
the
planthas been
partitionedinto
n subsystems wherethe
H;
arethe
subsystemcontrollers, the
xl
the
local
subsystem statevectors,
andthe rt
are
the
referenceinputs
to
each ofthe
subsystems.In
this scheme,
a communicationsbus
(the
controlnetwork)
has been
providedto
enablethe
exchange ofinformation
between
subsystems.The
required amount of communication at eachsampling
in
stant,
or perhapsthe
maximum amountif the
rate of exchangevaries,
wouldthen
dictate
the
requiredbandwidth for
this
communications channel.Figure 2 illustrates
an extreme example where
the
subsystem controllersonly
have
accessto the
local
state vector and reference
input,
providing
no mechanismfor information
exchangebetween
subsystems.This
type
of configurationis
known
astotally
decentralized
control.
Distributed
control can offer avariety
of advantages over a centralized scheme.These include
[2]:
taking
advantage ofthe
distribution inherent in
someplants;
in
creased
processing capability
due
to the
increase
in the
number of compute engines(typically
one persubsystem);
flexibility
to
changesin
the plant;
improved
tolerance
to
failures in
parts ofthe system; enabling
controllersto
be
delivered
as part oftheir
associated
subsystems;
and possible advantagesin
costdue
to
reduced wiring.When
designing
adistributed
controlsystem,
it is obviously necessary
to
guarantee
the
overallstability
ofthe
system andthat
the
desired
performance objectives areachieved.
One
factor
that
canstrongly influence
both
the
stability
and performanceof
the
systemis
the
amount of physicalcoupling
between
subsystemsin
the
plant.If
n,
ui
Plant
xi
Ut
n:
X,Un
n
xnCommunications
Bus
Figure
1:
Typical Distributed Controller Implementation
interactions
canlead
to
significant performancedegradations, instability
in the
system,
or even systemfailures. The
reasonfor
this
is
that
eachdistributed
subsystemcontroller
is
acting
upon a reduced set ofinformation
whencalculating its
controloutput
to the
plant(an
extreme example ofthis
canbe
seenin
Figure 2
wherethere
is
only
feedback
ofthe
local
stateinformation).
Strong
coupling
in
the
plantbetween
subsystems means
that
non-localbehavior in
the
systemis
impacting
the
evolutionof
the
local
subsystem states.In
essence, these
unknowncoupling interactions
areacting
asdisturbances
to the
local
subsystems.If
the
design
ofthe
local
controllersis
notsufficiently
robustto
these
disturbances,
the
coupling interactions
canlead
to
instability
ofthe
system.Thus,
the
design
ofthe
subsystem controllers andthe
communications mechanism must somehow account
for
these
coupling interactions in
order
to
guaranteeboth desired
performance and system stability.The
robustness ofthe
communications channelin
adistributed
controlimple
mentation can also
impact both
systemstability
and performance.Message
packetdelays,
lost
messages,
and other communicationsrelated problems canimpact
the
ren,
u,
Plant r.
xi
u,
n2
r.X,
11n
n
n
rn
\,
Figure
2:
Totally
Decentralized Controller Implementation
with
faulty
and/or out-of-dateinformation
can resultin inappropriate
controlactions.These
undesirable controller outputs canthen
lead
to
poor performance or evenin
stability
ofthe
system.In
many cases, requiring the
exchange oflarge
amounts ofinformation between
subsystems at eachsampling
instant
can contributeto these
types
ofproblems.Unexpected
message packetdelays
in
particular canbe
causedby
over-burdening
ofthe
communications network.So
it is
important to
ensurethat the
communication networkis
capable ofsup
porting the
requiredlevel
ofinformation
exchangebetween
subsystems.However,
the
higher
the
bandwidth
ofthe
communicationschannel, the
morecostly
the
im
plementation will
usually
become.
This
meansthat there
is
typically
astrong desire
to
minimizethe
required amount of communicationsbetween
subsystems while stillachieving
acceptable system performance.A
further
complicationis
that the
amountof
information that
mustbe
exchangedbetween
subsystems canvary
from
sampling
instant
to sampling
instant based
on avariety
offactors.
Thus,
it is
typically
difficult
1.2
Previous
Work
A variety
of methodshave been
presentedin
the
literature
for
guaranteeing
systemstability
and performance while stillrequiring
alimited
communicationsbandwidth
between
subsystemsin
adistributed
controlimplementation. These
methods canbe
separated
into
two
basic
types
of approaches.The
first
type
of approachinvolves
developing
analysis andimplementation
techniques to
minimizethe possibility
ofsystem
failures
due
to
communicationissues.
The
goal ofthis type
of approachit
to
enable
the
implementation
of alower
bandwidth
but
more reliable communicationschannel
between
subsystems.One
such approachis
outlinedin
[3]
wherethe
authorshave focused
onanalyzing the
real-time communications requirements and constraintsin
an effortto
better
predict system reliability.The
goalis
to
predictin
advancethe
capability
ofthe
networkto
supportthe
information
exchanges required andthe
probability
of potentialfailures.
In
[2]
the
controlleris
designed
assuming
a centralizedimplementation.
The
actualdistributed implementation
then
requiresinformation
exchangebetween
subsystemsacross a network.
The
authors propose a mathematicalframework
for analyzing
the
performancedegradation
ofthe
controllersdue
to
communicationdelays in
the
network.
An
analysistechnique
for
defining
an upperlimit
onthe
allowable communicationinterval in
a networked control system while stillguaranteeing
stability is
presentedin
[4].
The
authors assumethat the
distributed
nodes must communicatetheir
outputs
to
one another.An
extension ofthis
resultis
presentedin
[5]
where a predictionmethod
is
usedto
predictthe
output of each subsystembetween
consecutivetransmis
sions of
the
actual outputs.This
allowsfor
an extension ofthe
maximum allowabledelay
between
outputtransmissions
while stillguaranteeing
system stability.Other
authorshave
taken
aslightly
different
approachattempting
to
limit
the
amount of communications
that
are requiredbetween
subsystems as part ofthe
dis
allowing
any
information
exchangebetween
subsystems at all(totally
decentralized
control).
Many
authorshave
developed
techniques
for
designing
subsystem controllersthat
are robustto the
interactions
between
subsystems.Approaches
such as[6], [7],
[8], [9],
and[10]
allinvolve
designing
distributed
controllersthat
do
not requireany
information
exchangebetween
subsystem nodes while stillachieving
acceptable system
performance.These
approaches make use of an adaptive processto
makethe
localized
controllers robustto the
coupling
between
subsystems.In
eachcase, there
are restrictions placed on
the
plantdynamics,
the
size ofthe
interactions,
orboth
in
order
to
guarantee stability.In
[1]
an approachis
outlinedfor
minimizing
(rather
than
eliminating)
the
communications
between
subsystem nodesin
adistributed
controlimplementation.
This
is
accomplishedby
using
state estimation at each nodein
the
systemto
predictthe
state vectors of
the
other subsystems.In
this way, the
stateinformation
for
eachnode
does
nothave
to
be
communicatedto
all other nodes at eachsampling instant.
Instead,
each controller uses estimated values ofthe
state vectorsfor
the
other nodesin
the
systemto
updateits
control vector at eachsampling instant.
Figure 3
showsa
block diagram
ofthis
approach.In
this
figure,
the
region enclosedby
the
dotted
square
is
aninternal
view of subsystem1.
Each
ofthe
other subsystems wouldhave
a similar structure.
So
each subsystemcontains animplementation
ofthe
full
systemcontrollerand a
full
system estimator.The
estimated outputs are usedin
conjunctionwith
the
locally
measurable outputsto
determine
the
local
controller outputto the
plant.
In
orderto
guarantee acceptabletracking
using this approach, the
authorsenforce an upper
bound
onthe
state estimation errorfor
each node's state vector.When
the
state estimation errorfor
the
ith
nodeis larger
than this
pre-establishedbound,
the
locally
measured system outputsfor
this
node are communicated acrossthe
bus
to
allthe
other nodesin
the
system.The
other nodes canthen
usethe true
output vector
for
the
ith
nodeto
updatethe
states oftheir
local
estimators.The
Controller
1
'full
Controller
(full sys)
Estimator (full sys)
IS
Subsystem 2
Subsystem 1
'MSubsystem M
JM
yM
[image:16.505.85.423.48.299.2]Plant
Figure 3: Block Diagram
ofthe
State Estimation
Scheme
Proposed
in
[1]
performance of
the
systemto
be
traded
off againstthe
amount of communicationstraffic
requiredbetween
subsystems.The
success with whichthis type
of approach can reducethe
required rate of communications
between
subsystemsis
highly
dependent
uponthe
accuracy
ofthe
plantmodel used
in the
design
ofthe
state estimator.Along
these
lines,
anissue
that
is
notaddressed
by
this type
of approachis
the
effect ofslowly
changing
plantdynamics.
Take
the
case of a plant whosedynamics
are affectedby
frictional
wear or other agerelated effects
to
its
mechanical elements.Using
the
static state estimation scheme of[1],
the accuracy
with whichthe
original state estimator representsthe
actual plantwould
slowly
decay
overtime
asthe
plantdynamics
evolve.Without
someform
ofre-tuning
ofthe
state estimatorbeing
used, this
degradation in
the
performanceofthe
state estimator would result
in
a growthin
the
amount of communications requiredbetween
subsystems overtime.
In
extremecases, this
could resultin
communications
1.3
Overview
The
objectiveofthis
work wasto
develop
an adaptive control schemethat
couldbe
usedto
reduce network messagetraffic
in
adistributed
controlimplementation
while stillachieving
acceptable statetracking
performance andguaranteeing
overall system stability.An important
goal ofthis
work wasto
demonstrate
improved
performanceof
this
adaptive method over a static estimation and control schemefor
the
case ofpoorly
modeled plantdynamics.
The
remainder ofthis
paperis
organized asfollows: The framework
ofthe
problem
and an analysis ofthe
systemdynamics is
presentedin Section
2;
The
stability
of
the
overall system as well asthe
convergence ofthe
tracking
errorduring
adaptation
is
provenin
Section
3;
Simulation
resultsdemonstrating
the
performance ofthe
2
Problem Statement
and
Framework
2.1
System Analysis
Consider
anM
input,
M
output plantdescribed
by
the
following
equations:x{t)
=Ax(t)
+
Bu(t)
+
Br(t)
(2.1)
y{t)
=Cx{t)
(2.2)
where
x(t)
E
$tNis
the
state vector ofthe plant,
u(t)
e
5?Mis
the
controlvector,
r(t)
G
5RA/is
the
vector ofreferenceinputs
to the system,
andy(t)
G
UMis
the
outputvector.
The
matricesA, B,
C
are,
for
the moment,
assumedto
be
constant and ofthe
following
sizes:A
:N
xN,
B
:N
x71/,
C
:M
xN
In
this
investigation it is
assumedthat the
B
andC
matrices areknown,
but
that
the
A
matrixis
unknown.Now,
the
plantis
partitionedinto
M
coupled subsystems where each subsystemis
single-input.
After
the partitioning,
each subsystemhas
Np
states whereN
=MNp.
It is
assumedthat the
systemhas
been instrumented
suchthat
all ofthe
states ofthe
local
subsystems are measurable.Furthermore,
for
the
purposes ofthis
investigation,
only
those
plants whoseinput
and output matrices arein
the
following
form
are considered:B
=blkdiag(Bu
B2,...
BM)
(2.3)
C
=where
the
Bt
are vectors of size(Np
x1)
andthe
C;
are vectors ofsize(1
xNp).
A
system composed ofinterconnected
masses,
such asthe
spring-mass-dampersystem presented
in
Section
5.1,
is
an example of a systemthat
satisfiesthese
requirements.
In
this example, the
systemis
partitioned suchthat the
subsystem stateequations
describe
the
dynamics
of each ofthe individual
masses.There is
aseparateforce input
appliedto
each ofthe
massesthat
does
notdirectly
affectthe
motion ofthe
other massesin
the
system-the
appliedforce
only
directly
affectsthe
accelerationof
the
mass whilethe
coupling between
the
masses occursthrough
the
positions andvelocities.
Because
the
subsysteminteractions
occurthrough
states ofthe
systemthat
are notdirectly
affectedby
the
subsysteminputs,
the
input B
matrix willbe
ofthe
desired block diagonal form.
Assuming
that the input
matrixis block
diagonal,
the
statedynamics
of(2.1)
canbe
rewritten asfollows:
B1
0
0
B2
0
0
xx
2
0
0
An
Ai2
A2\
A22
Aim
A2m
B
MA
U-2
UM
Ml
AMl
' - 'Si
0
0
B2
0
0
A
MMXl
X2
Xm
+
0
0
B
Mr2
rM
(2.5)
where
An
is
the
Np
xNp
matrixrepresenting the
local
statedynamics
ofthe
zthsubsystem,
A^-is
the
Np
xNp
matrixrepresenting the
coupling
dynamics
between
the
states ofthe
zth andjth
subsystems,
xt
is
the
Np
x1
state vector ofthe
ith
subsystem,
5;
is
the
Nv
x1 input
matrix ofthe ith. subsystem, r;
is
the
1
x1
referenceFactoring
the
interaction
terms
from
the
A
matrixin
(2.5),
the
following
is
obtained:Xl
x2
xm
An
0
0
A22
0
0
0
Al2
A21
0
Ami
Am2
0
0
A
MM ''1X2
xM
+
5i
0
0
B2
0
0
0
Ui
0
u2
Bm
Um
+
A\M
A2M
Xl
x2
xm
+
Bi
0
0
B2
0
0
0
0
B
MTl
r2
(2.6)
This
expression canbe
simplifiedby
writing,
Xl
2
xMMi
0 0A22
0 0 X2 XMSi
o 0 0 0("i +n)
01
("2 +r2)
+4>2
(M
+ rAI)4>M
(2.7)
where,
A/ M>>2
=Y.
AVX3
M9j
/ j/iij Xj
j=l,j^ti(2.8)
Here
the
fa
matrices representthe
contributionto the
statedynamics
ofthe
z'thsubsystem
due
to the
other(M
1)
subsystems.The
dynamics
ofthe
zth subsystemcan now
be
written:i(t)
=AiXiit)
+
BiUi(t)
+
BiTi(t)
+
fa
yi(t)
=where,
i
=1,
2,
. . .,
M,
xt(t)
G
^RNpis
the
state vector ofthe ith subsystem,
Az
=Au,
Ui(t)
G
5R1is
the
controller outputfor
the
ith
subsystem,
r,(t)
G
3?1is
the
referenceinput
for
the
ith
subsystem,
andyl(t)
G
5ft1is
the
output ofthe
ith
subsystem.A
block
diagram
ofthis
subsystem modelis
shownin
Figure
4.
U.
<f>,
Figure
4:
Block Diagram
ofthe ith
Subsystem
In The Partitioned Plant Model
The
objectiveis
to
design
a controllern
that
willforce
the
states of(2.1)
to track
those
ofthe
following
reference model:xm(t)
=Amxm(t)
+
Br(t)
(2.10)
assumed
to
be
completely
decoupled
suchthat,
Ar
Ami
0
0
0
Am2
0
0
0
A
mM(2.11)
If
the
reference modelin
(2.10)
is
then
partitionedinto 71/
subsystems,the
dynamics
of
the
ith
subsystem ofthe
reference model canbe
writtenas,
xmi(t)
=Amixmi(t)
+
Bir^t)
(2.12)
The
objectiveis
then to
design
the
subsystem controllers(nA
that
willforce
the
subsystem states
re*
to track the
reference model statesxmi.A diagram
ofthe
proposedsystem
partitioning is
shownin
Figure
5.
In
this
diagram,
it is
assumedthat
acommunications
bus is
availableto
enable some amount ofinformation
exchangebetween
subsystems.Part
ofthe
design
ofthe
subsystem controllersHj
is
determining
how
muchinformation
will needto
be
communicated acrossthis
bus.
n,
n
;
fc
nn
ffliU
>Communications Bus
xl
u.
X,
Un
-_ Xn
In
orderto
ensurethat the
controllerfor
the
ith
subsystemcancompensatefor
the
interaction
terms
(fa)
in
(2.7),
a restriction ofthe
form
posedin
[10]
willbe
adheredto.
This
restriction requiresthat the
interconnection
terms
be
representablein the
following
form:
71/
&=
B^Xj
(2.13)
where
the
Ax
1
vector^
representsthe
unknownlinear coupling between
subsystemsi
andj.
A
comparison ofthis
equation with(2.8)
showsthat this
restriction equatesto the
following,
Aij
=B^l
(2.14)
The
nature ofthis
restriction canbe better
understoodin
the
context of(2.6).
From
this equation, the
dynamics
ofthe
ith
subsystemare,
xz
=B{r{
+
BiUi
+
AaXi
+
[Anx1
+
Ai2x2
+
. .+
AiNxN]
(2.15)
where
the term
AtiXi
has been
intentionally
moved outsidethe
brackets. The
restriction
in
(2.14)
requiresthat the
equation above canbe
written asfollows:
xz
=Bxri
+
B^i
+
AaXi
+
Bt
[V^Zi
+
ip[2x2
+
+
iP[nxn]
(2.16)
A
comparison of(2.15)
and(2.16)
showsthat
imposing
this
constraint amountsto
reducing the complexity
ofthe interaction terms.
Specifically,
the
contributionfrom
the
jth subsystemto the
dynamics
ofany
ofthe
other subsystemsis simply
aweightedlinear
combination ofthe
elements of state vector Xj.The
extentto
whichthis
scalarquantity
(tjjfjXj)
affectsthe
evolution of each ofthe
statesin
subsystem state vectorXi
is determined
by
the
local input
vectorBt.
Thus,
the
contributionsto
each elementof
Xj
from
Xj
are notlinearly
independent
asthey
arefor
(2.15).
This
is
the
reductionin
complexity
ofthe
interaction
terms that
wasreferredto
above.An
example systemThe
reasonfor enforcing
the
restrictionin
(2.14)
is
to
ensurethat the
controllerfor
the
ith
subsystemis
capable offully
compensating
for
the
contributionsfrom
the
other(M
1)
subsystems.The
goal wouldbe
to
have
aterm
in
the
controlleract
to
completely decouple
the
ith
subsystemfrom
the
dynamics
of all ofthe
othersubsystems.
Substituting
(2.13)
into
(2.7),
the
dynamics
ofthe
ith
subsystem canbe
represented
in
the
following
form:
M
Xi(t)
=AiXi(t)
+
BiUi(t)
+
Bitiit)
+
Bt
ipfjXj
i=ij/z
Vi(t)
=Qx^t)
(2.17)
where
i
=1,2,...,
M.
From
this
equationit is
clearthat,
if the ith
controllerhas
perfect
knowledge
ofthe
statesXj
ofthe
othersubsystems,
then
a controllerterm
ofthe
following form,
M
Ut
=-J2
^HXJ
(2-18)
allows
the
controllerto completely
decouple
the
statedynamics
ofthe
ith
nodefrom
those
ofthe
other subsystems whenip^
= ip^.Other
terms in the
controller couldthen
be
utilizedto
ensurethat the
subsystem statesXj
track those
ofthe
desired
reference model xmi.
Using
a controllerform
similarto that
presentedin
[6],
the
control vector ofthe
ith
subsystem(ut)
is designed
asfollows:
M
Ui
=Kjxi-Y.
$jxo
(2-19)
where
ipij
G $lNp
is
the
estimation ofthe
unknowncoupling
between
the
ith
andjth
subsystems and
Ki
is
the
local
statefeedback
controller gain vector.The
secondterm
in
this
controller equation actsto
decouple
the
dynamics
ofthe
ith
subsystemfrom
the
rest ofthe
system.The
statefeedback
term
K?Xi
then
servesto
adjustthe
Substitution
of(2.19)
into
(2.17)
givesthe
following
modelfor
the
ith
subsystem:M M
i(t)
=AiXi(t)
+
Bi[kfxi(t)-Y
tfjxA
+
BinW
+
Bi
Y
^lxi
yx(t)
=dxi(t)
(2.20)
In
orderto
guaranteethat
a controllerofthe
form
posedin
(2.19)
cansuccessfully
achieve
the
desired
tracking
objective,
anotherimportant
restrictionmustbe
imposed.
This
restrictionis
that,
for
some unknown controller gain vectorK*,
the
following
relation must
hold:
Ami
=A
+
BxKf
(2.21)
Rearranging
this
equationslightly
willhelp
with anintuitive
understanding
ofthis
restriction.
Ami
-Ax =B{Kf
(2.22)
Here it is
clearly
seenthat the
imposed
constraint places a restriction onthe
difference
between
the
desired
systemdynamics
(those
ofthe
reference modelAmi)
andthe
nominal plant
dynamics
(AA. Once
again, this
will ensurethat the
proposed controller willbe
capable ofachieving the
desired
tracking
objective.A
morefundamental
understanding
ofthe
reasonfor
imposing
this
constraint caneasily
be
obtainedby
closeinspection
of(2.20).
If
the
estimates ofthe
interaction
terms perfectly
matchthe
actualcoupling
dynamics
then,
4>a
=4>ij
(2.23)
and
(2.20)
canbe
reducedto the
following:
i(t)
=[Ai
+
BikJ]xi(t)
+
Bin(t)
Vi(t)
=A
comparison ofthis
equation with(2.12)
clearly
showsthat
perfecttracking
ofthe
reference model statesis
guaranteedif
(2.21)
holds
andKt
=K*.
Since
this
desired feedback
gain vectoris
assumedto
be
unknown, the
problemthen
becomes
designing
the
appropriatelocal
feedback
gain vectorsKx
that
will ensuretracking
ofthe
reference model states.A
closerinspection
ofthe
restrictionimposed
by
(2.21)
is
nowin
order.A
sufficientcondition
for
this
restrictionto
be
satisfiedis
that
both
the
reference modeldynamics
and
the
subsystemdynamics
be
expressiblein
the
following
companionform
(the
idea
ofexpressing
the
subsystems ofthe
reference model andthe
plantin
this
form
is
borrowed
from
Gavel
andSiljak
in
[10]):
A,
0
0
~oA(fc-i)
-a1
0
(fc-2)
-a0
1
(fc-3)
0
0
-a]Ai
=0
0
1
0
0
1
~P\k-l)
~P\k-2)
P[k-Z)
0
0
-PI
(2.25)
Bx
=Bmi
=[
0
0
. .0
1
]
Ci
=Cmi
=1
0
0
...
0
If
the
system andthe
reference model canbe
expressedin
this
generalform
then,
(Ar
AA
=0
0
0
0
0
0
(%-d-4-d)
(fl
(fc-2)
a\k-2))
(PI
-<*[)
From
this
equation andthe
form
ofBt
in
(2.25)
it is
clearthat,
3K:\Ami
=Ai
+
BiK;T,\/i
(2.27)
and
(2.21)
is
satisfied.In
fact,
this
desired
gain vectoris
givenby,
A'M ($*-!)
-<Vd)
(%-2)-^fc-2))
(/3i-i)f
(2-28)
This
analysishas
shownthat
if
the
subsystemdynamics
canbe
writtenin
the
companion
form
of(2.25),
then the
restrictionimposed in
(2.21)
willbe
satisfied.While
the
companionform is
not requiredto satisfy this restriction,
it is
a sufficientcondition.
Further,
a sufficient conditionfor
the
systemto
be
expressiblein
the
proposed companion
form is
that the
subsystemsbe both
controllable and observable[10].
Thus,
a sufficient conditionfor
the
restrictionin
(2.21)
to
be
metis
that the
system
being
analyzedis
both
controllable and observable.2.2
Problem Statement
With
the necessary
constraints onthe
plantdynamics
satisfied, the
problemis
then to
design
the
subsystem controller gainsKi
andthe
estimates ofthe
interaction
terms
ipij
in
(2.19)
for
each ofthe
71/
subsystems,
suchthat the
plant statesXj
track
those
ofthe
reference model xmi.It is
further
requiredthat the
design
ofthe
subsystem controllers provide a mechanism
for
reducing the
amount ofinter-node
communications,
while stillguaranteeing stability
andachieving
the
desired
tracking
performance.
2.3
Distributed Control Method
The
controllerform
proposedin
(2.19)
requiresthat the
ith
subsystemhave
complete
knowledge
ofthe
state vectors ofthe
other(M
1)
subsystems(the
Xj
terms
in
this
equation).This is
equivalentto
a centralized controllerimplementation
andthe
other(71/
1)
subsystem at eachsampling
instant.
In
many cases, implementa
tion
constraints(such
aslimited
communicationbandwidth)
makethis
requirementimpractical. In
orderto
limit
the
amountof communication requiredbetween
subsystems,
a state estimation scheme willbe implemented
at each node.These
estimatorswill predict
the
states ofthe
other nodesin the
system.The
subsystem controllerscan
then
usethe
output ofthese
estimatorsto
calculatetheir
controlactions,
ratherthan
requiring
the
actual states ofthe
other subsystems.As
long
asthe
estimatoroutputs are used
in
the
subsystemcalculations,
no communicationbetween
subsystems
is
required.With
this
estimation schemein
mind, the
control vectorfor
the
ith
subsystem needsto
be
modifiedfrom
the
form
shownin
(2.19).
Define
the
statetracking
errorfor
the
ith
subsystem node asfollows,
Cj
Xi
xm^
^z.zyj
Now,
the
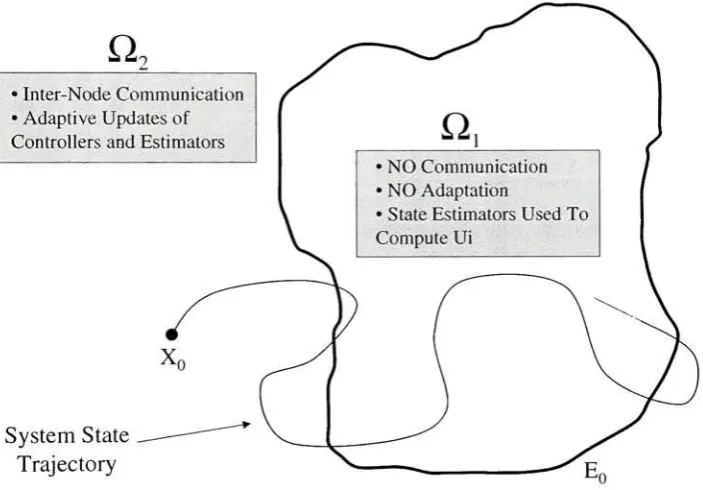
state space ofthe
systemis
partitionedinto
two
regions asfollows:
x
G
Q\
:efe* <
El0,Vi
x
G
Q2
:3z
]
ejei >
El0
(2.30)
where
El0
is
the
desired
performancebound
for
the ith
subsystem.The
controlleroutput will
then
be different for
each ofthese two
regions.Using
abounded
errorapproach similar
to that
presentedin
[1]
and[11],
the
controllerfor
the
ith
subsystemis
defined
as,
u =
[
ft*
-E&,,-*
$*;
fOT
**i
,2 311
1
\
kJxi-^U^i^j
forxGQ2
where
Xj
G
3tNpis
the
estimated state vectorfor
the
jth subsystem.Thus,
the
estimated states of
the
other(M
1)
subsystems are usedto
determine
the
controlxl
II,
Plant
. Xl
ul
r(ull
*1'X3
^n
x2
n
2 X-,r.uii
u2
xx2,."..,xn
*n
n
, v"rfull
Un
nications
Bus
Figure
6:
Block Diagram Of Plant With Communication
(efet
<
ElQ).
A block diagram
ofthe
system underthese
conditionsis
presentedin
Figure
7.
Once
the
tracking
error growsbeyond
this
bound,
the
actual subsystemstates will
be
communicatedbetween
nodes and usedto
determine
the
controlleroutput
Ui
at each node(see
Figure 6).
The design
ofthe
controller and estimatorparameters
to
ensurestability
anddesired
tracking
performanceusing
this
schemewill
be investigated in Section 3. Section 2.4 describes
the
proposed methodfor
eachnode
to
estimatethe
state vectors ofthe
other nodesin
the
system.2.4
Adaptive
Estimation Method
One
ofthe
key
features
ofthe
present approachis
the
use of an adaptive stateestimator
to
reducethe
amount ofcommunicationsrequiredbetween
subsystems whilestill
maintaining
acceptabletracking
ofthe
reference model states andguaranteeing
system stability.
Rather
than requiring that
each subsystem node communicateits
statevector
to
all ofthe
other(M
1)
nodes at eachsampling
instant,
each node uses [image:29.505.112.390.63.276.2]r
, Local State Estimator AX
II,
x
Plant
r IIIIIUn
X
xn
Local State Estimatorn2
rfull
,riull
Un
'X
*
Local State Estimatorrt
u1 1nn
rfull
U
Figure
7:
Block
Diagram
Of Plant
Without Communication
state values are
then
usedby
each nodeto
calculatethe
requiredlocal
controlleroutput
to
achievethe
desired
tracking
performance.There
aretwo
separateforms for
the
proposed state estimatorthat
needto
be
considered one
for
each ofthe
state space regionsdefined in
(2.30).
Each
ofthese
forms
willbe
consideredseparately below.
2.4.1
Estimator Form For
xG
fi2
Recall
that
full
knowledge
ofthe
system statesis
assumed when xEVt2.
As
long
as
the
state vector remainsin
this region,
communicationbetween
subsystems willoccur and
the
adaptive process will adjustthe
controller and estimator parameters.For
this situation, the
statedynamics for
the jth.
subsystem node are asfollows:
M M
Xj
=AjXj+Bj[kJxj-Y ^kxk]
+
Bjrj
+
Bj
Y
tfkxk
k=l,k^tj
fc=l,fc^j
Define
the
local
closedloop
statedynamics, ignoring
the coupling
interactions,
for
the
jfth nodeto
be,
ACJ
=A,
+
BjKj
(2.33)
Ignoring
the
interactions
between
subsystemsin
(2.32),
the
following
state estimatoris
then
proposed[12]:
%
=AmjXj
+
(Acj
-Amj)Xj
+
B]r]
(2.34)
This
estimatorform
requiresknowledge
ofthe
subsystem statesXj
that
it is
trying
to
estimate.The
purpose ofthis
form is
to train the
estimator whilethe
actual statevalues are available.
Once
the
parameters ofthe
estimatorhave been
sufficiently
adapted, then the
estimates ofthe
states canbe
usedin
place oftheir
actual values.Now,
for
the ith
node(j ^ i)
the
actual state valuesXj
areonly
available whenthere
is
communicationbetween
the
ith
andjth
nodes(when
xG
Cl2).
Once
the
system state vector enters region
f2i,
inter-subsystem
communication will cease andthe
actual state valuesXj
will nolonger be
available.Thus,
the
form
ofthe
estimatorwill need
to
be
modifiedto
accountfor
this.
This is discussed
in
Section
2.4.2.
The
motivationfor
choosing the
estimatorform
in
(2.35)
becomes
clearer aftera minor manipulation of
this
equation.Using
the
fact
that
ACj
ACj
ACj
this
equation can
be
rewrittenas,
Xj
-rijjijXj "r/\qjXj
"r -<*cjXj \X^j'j
yZ.ooj
Now,
for
the
case wherethe
output ofthe
state estimator convergesto the
actualstate vector
Xj, then
Xj
>0.
Further,
if
the
modelfor
the
local
statedynamics
ACj
convergesto that
ofthe
actualdynamics
ACj,
then
Acj
>0
as well.Under
these circumstances, the
first
andthird terms
in
(2.35)
are zero and we areleft
withXj
=ACjXj.
This is
is
trying
to
predict.Thus,
if
the
adaptive process candrive
the
state estimation errorXj
andthe
modeling
errorAcj
to zero,
(2.35)
providesthe
appropriateform for
the
estimator
dynamics.
The
estimatorform in
(2.35)
does
not accountfor
the interactions
between
subsystems.
However,
these terms
cannotbe
neglectedin
the
actualsystem,
sothe
form
of
this
equation mustbe
modifiedto
accountfor
this.
The form
ofthe
estimatorcould
be
chosenas,
M
Xj
=AmjXj
+
(Acj
-Amj)xj
+
BjTj
+
B3
Y
^lkxk
(2-36)
k=l,k^j
where,
ipjk
=ipjk
ipjk
representsthe
errorin
estimating the interactions
between
nodes
j
andk.
Unfortunately,
this
form
requiresthat the
actual values ofthe
estimation error
ipjk
be known.
Since
the
actualinteraction
terms
ipjk
are assumedto
be
unknown, this
is
not a realistic requirement.Thus,
a slight modification needsto
be
made
to
(2.36).
Define
the
following:
Tj-fc
=ipjk
(2.37)
The form
ofthe
adaptive state estimatoris
then
be
written asfollows:
M
ij
=Amjxj
+
(Acj
-Amj)xj
+
Bjrj
+
Bj
Y
^Jkxk
(2.38)
k=l,kjj
where,
Tjk
=ipjk
is
the
actual errorin modeling the coupling
between
nodesj
andk
and
Fjk
representsthe
estimate ofthis
errorterm.
Thus,
sincethe
actualipjk
vectoris
not available
for
measurement, this quantity
willbe
estimated.The
choice ofadaptive2.4.2
Estimator
Form For
xG
fii
While
the
system state vectoris
within regionJli,
communicationbetween
subsystems
does
not occur.Thus,
the
actual state vectorsx3
andxfc
in
(2.38)
are nolonger
available
to the
ith
subsystem.Under
these circumstances, the
proposed estimatorform
needsto
be
modified slightly.In
particular, the
estimates ofthese
states willbe
used
instead
oftheir
actual values.Temporarily
ignoring
the coupling interactions
between
subsystems andsubstituting
Xj
=j
in
(2.34)
then
producesthe
following,
'j
AcjXj
+
BjXj
(2.39)
Thus,
when xG
Q\
the
estimate ofthe
closedloop
dynamics
ofthe jth
subsystem
(ACj)
determines how
the
estimated state vectorXj
will evolve.For
the
moregeneral case
that
includes
the
contributionfrom
the coupling
between
subsystems,
substituting
Xj
=Xj
andxk
=xk
in
(2.38)
produces,
M
=
AC3x3+BJrJ
+
B]
Y
Fjkxk
(2.40)
k=l,k^j
This is
the
form
ofthe
state estimatorthat
willbe
utilizedwhen xG
f^i- No
adaptation
ofthe
estimator parameters occurs whilethe
system state vector remains withinthis
region.It is
assumedthat
the
estimatoris
providing sufficiently
accurateresults,
so
long
asthe
tracking
errorfor
all ofthe
subsystems remainsbelow
the
desired
thresholds.
If
the
tracking
errorfor
any
ofthe
subsystems growsbeyond
its
threshold
(El),
then
communicationbetween
subsystems andthe
adaptive process areboth
restarted.
The
goalis
then to
adjustthe
controller and estimator parametersto
im
prove system performance while
the
actual state vectors ofthe
other subsystems are3
Controller
Design
and
Stability
Analysis
The
problem presentedin
this
paperis
to
design
adistributed
controllerin
the
form
of
(2.31)
that
willforce
the
system states of(2.17)
to
track
the
states ofthe
desired
reference model
(2.10).
In
addition,
an adaptive state estimatoris designed for
eachsubsystem which enables a reduction
in
the
required amount ofinter-node
communications.
The
approach presentedhere is
to
design
the
controller and estimatorparameters
using
an adaptive methodbased
onLyapunov
stability
analysis.Thus,
the
adaptive updatesfor
the
controller and estimator parameters willbe
selected soas
to
ensurestability
ofthe
tracking
errorse*
and state estimation errors Xj.In
orderto apply the
Lyapunov
stability
analysistechniques
to the
proposeddistributed
controlscheme,
a separateLyapunov function (VA
willbe
identified
for
each subsystem.
The
stability
ofthe
overall system canthen
be
concludedusing the
following
Lyapunov function:
M
v
=Y^
(3-41)
2=1
Upon
closeinspection
of(2.31),
it is
obviousthat there
aretwo
cases which requireseparate consideration
in
the stability
analysis: xG
Qi
and xG
Q2
asdefined
in
(2.30).
Each
ofthese
cases willbe
consideredseparately
below.
3.1
No Adaptation
The first
caseto
be
consideredis
whenthe
system state vectoris
within regionQi
asdefined
by,
xEQi:eJei<ElQ,\/t
(3.42)
In
this case, there
is
no communicationofthe
local
statevectorsbetween
subsystems.This
meansthat
at eachnode, the
estimator outputsXj
willbe
usedto
calculatethe
controller outputu{
at eachsampling instant
(see
equation2.31).
Adaptation
ofthe
estimator andthe
controller parametersdoes
not occurfor
xG
fy.
During
this
tracking
error.It
is
assumedthat the
bounds
El0
are set suchthat
the
performanceof
the
systemis
considered acceptable aslong
as xG
^i.
In
this case,
because
the
system states are upper
bounded
by
the
giventhreshold
valuesElQ,
the
systemis
bounded-input
bounded-output
(BIBO)
stableby
assumption.3.2
During
Adaptation
The
second caseto
be
consideredis
whenthe
system state vectoris
within regionfl2
asdefined
by,
x
G
02
:3z
|
ef
e%
>
El0
(3.43)
In
this case, the
estimator andthe
controller parameters willbe
adaptedin
an effortto
drive
the
system statestowards those
ofthe
reference model(and
thus to
drive
the
system state vectorback into
regionfij).
In
addition,
communicationbetween
subsystems will
be occurring
suchthat the
entire system state vector x willbe known
to
each subsystem.This
meansthat the
ith
subsystem willhave
accessto the
actualstate vectors
Xj
ratherthan
just
the
estimates Xj.This information
canthen
be
usedto
calculatethe
local
controller outputUi
as well asthe
adaptive updatesto
local
controller and state estimator parameters.
For
these conditions,
Lyapunov
stability
theory
willbe
usedto
determine
the
appropriate controller updates
that
guaranteestability
ofthe
overall system.In
orderto simplify the
development,
the stability
ofthe
adaptive controller andthe
adaptivestate estimators are considered
separately
below.
3.2.1
Adaptive Controller
Following
the
development in
[6],
considerthe
following
Lyapunov function
candidate for
the
ith
subsystem:M
where,
ki
= ki-K*(3.45)
i>ij
=i>ij
-ipij
(3-46)
and
Bi
is
a positive-definite matrixthat
is
the
solutionto the
following
Lyapunov
equation:
ATmiBi
+
BtAmi
=-Qt
(3.47)
It is
clearby
inspection
that the
function
in
(3.44)
is
positivedefinite.
Taking
the
time
derivative
ofthis
equationalong
the
systemtrajectory
then
givesthe
following:
.
x M ._ .
x
Vl
=eTBlel + elBlel +
k7kl
+
kikl+
Y
$!&,
+
A^j]
(3-48)
j=i,j&
Referring
to
(2.29),
the time-derivative
ofthe
statetracking
error canbe
written asfollows:
6i
Xi
xmi
^o.^tyj
Substitution
of(2.12)
and(2.20)
into
this
equationthen
gives:M
<=;
=AiXi
+
Bi[Kjxi
-Y
V?xj
+
ri\ +
AmiXi
~Biri
(3-50)
Now,
using
(2.21)
the
equation above canbe
rearrangedto
give:e, =
BiKf
Xi +
Amie%
+
Bt
Y
Wjx3
(3-51)
The last four
terms
in
(3.48)
involve
the
time-derivatives
ofthe
controller parameterdefinitions
ofthe
errorsthemselves
asfollows:
Ki
= Kt-K*(3.52)
Ki
=Ki
(3.53)
Similarly,
for
the
errorin
the
estimates ofthe
interaction
terms:
ipij
=i>ij
~ipij
iii
=-A3
(3-54)
Following
the
development
in
[6],
the
proposed adaptive updates are asfollows:
Kj
=-ejBiB.xf
(3.55)
ipzj
=eTPiBixj
(3.56)
Substitution
of(3.55
![Figure 3: Block Diagram of the State Estimation Scheme Proposed in [1]](https://thumb-us.123doks.com/thumbv2/123dok_us/124884.12101/16.505.85.423.48.299/figure-block-diagram-state-estimation-scheme-proposed.webp)