Volume 2007, Article ID 90401,13pages doi:10.1155/2007/90401
Research Article
A Simplified Constant Modulus Algorithm for
Blind Recovery of MIMO QAM and PSK Signals:
A Criterion with Convergence Analysis
Aissa Ikhlef and Daniel Le Guennec
IETR/SUPELEC, Campus de Rennes, Avenue de la Boulaie, CS 47601, 35576 Cesson-S´evign´e, France
Received 31 October 2006; Revised 18 June 2007; Accepted 3 September 2007
Recommended by Monica Navarro
The problem of blind recovery of QAM and PSK signals for multiple-input multiple-output (MIMO) communication systems is investigated. We propose a simplified version of the well-known constant modulus algorithm (CMA), named simplified CMA (SCMA). The SCMA cost function consists in projection of the MIMO equalizer outputs on one dimension (either real or imag-inary part). A study of stationary points of SCMA reveals the absence of any undesirable local stationary points, which ensures a perfect recovery of all signals and a global convergence of the algorithm. Taking advantage of the phase ambiguity in the solution of the new cost function for QAM constellations, we propose a modified cross-correlation term. It is shown that the proposed algorithm presents a lower computational complexity compared to the constant modulus algorithm (CMA) without loss in per-formances. Some numerical simulations are provided to illustrate the effectiveness of the proposed algorithm.
Copyright © 2007 A. Ikhlef and D. Le Guennec. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
1. INTRODUCTION
In the last decade, the interest in blind source separa-tion (BSS) techniques has been important. The problem of blind recovery of multiple independent and identically distributed (i.i.d.) signals from their linear mixture in a multiple-input multiple-output (MIMO) system arises in many applications such as spatial division multiple access (SDMA), multiuser communications (such as CDMA for code division multiple access), and more recently Bell Labs layered space-time (BLAST) [1–3]. The aim of blind sig-nals separation is to retrieve source sigsig-nals without the use of a training sequence, which can be expensive or impos-sible in some practical situations. Another interesting class of blind methods is blind identification. Unlike blind source separation, the aim of blind identification is to find an es-timate of the MIMO channel matrix [4–6]. Once this es-timate has been obtained, the source signals can be effi -ciently recovered using MIMO detection methods, such as maximum likelihood (ML) [7] and BLAST [8] detection methods. The main difference between blind source sepa-ration and blind identification is that in the first case, the source signals are recovered directly from the observations, whereas in the second case, a MIMO detection algorithm
is needed, which may increase complexity (complexity de-pends on used methods). Note that, unlike BSS techniques, ML detector is nonlinear but optimum and suffers from high complexity. Sphere decoding [7] allows to reduce con-siderably ML detector complexity. On the other hand, the performance of MIMO detection methods depends strongly on the quality of the channel estimate which results from blind identification. In this paper, we consider the problem of blind source separation of MIMO instantaneous chan-nel.
In order to improve the performance of the CMA for QAM signals, the so-called modified constant modulus algo-rithm (MCMA) [17], known as MMA for multimodulus al-gorithm, has been proposed [18–20]. This algorithm, instead of minimizing the dispersion of the magnitude of the equal-izer output, minimizes the dispersion of the real and imagi-nary parts separately; hence the MMA cost function can be considered as a sum of two one-dimensional cost functions. The MMA provides much more flexibility than the CMA and is better suited to take advantage of the symbol statistics re-lated to certain types of signal constellations, such as non-square and very dense constellations [18]. Please notice that both CMA and MMA are two-dimensional (i.e., employ both real and imaginary part of the equalizer outputs). Another class of algorithm has been proposed recently and named constant norm algorithm (CNA), whose CMA represents a particular case [21,22].
In this paper, we propose a simplified version of the CMA cost function named simplified CMA (SCMA) and based only on one dimension (either real or imaginary part), as opposed to CMA. The major advantage of SCMA is its low complexity compared to that of CMA and MMA. Because, instead of using both real and imaginary parts as in CMA and MMA, only one dimension, the real or imaginary part, is considered in SCMA, which makes it very attractive for practical implementation especially when complexity issue arises such as in user’s side. We will demonstrate that only the existing stationary points of the SCMA cost function corre-spond to a perfect recovery of all source signals except for the phase and permutation indeterminacy. We will show that the phase rotation is not the same for QAM, 4-PSK, andP-PSK (P≥8). Moreover, in order to reduce the complexity further, we will introduce a modified cross-correlation term by tak-ing advantage of the phase ambiguity of the SCMA cost func-tion for QAM constellafunc-tions. An adaptive implementafunc-tion by means of the stochastic gradient algorithm (SGA) will be de-scribed. A part of the results presented in this paper (QAM case with its convergence analysis) was previously reported in [23].
The remainder of the paper is organized as follows. In Section 2, the problem formulation and assumptions are in-troduced. InSection 3, we describe the SCMA criterion. The convergence analysis of the proposed cost function is car-ried out inSection 4.Section 5introduces a modified cross-correlation constraint for QAM constellations. InSection 6, we present an adaptive implementation of the algorithm. Fi-nally,Section 7presents some numerical results.
2. PROBLEM FORMULATION
We consider a linear data model which takes the following form:
y(n)=Ha(n) +b(n), (1)
wherea(n) = [a1(n),. . .,aM(n)]T is the (M×1) vector of
the source signals,His the (N×M) MIMO linear memory-less channel,y(n)=[y1(n),. . .,yN(n)]Tis the (N×1) vector
of the received signals, andb(n)=[b1(n),. . .,bN(n)]Tis the
(N×1) noise vector.MandNrepresent the number of trans-mit and receive antennas, respectively.
In the case of the MIMO frequency selective channel (convolutive model), the system can be reduced to the model in (1) tanks to the linear prediction method presented in [5]. Afterwards, blind source separation methods can be applied. The following assumptions are considered:
(1) Hhas full column rankM,
(2) the noise is additive white Gaussian independent from the source signals,
(3) the source signals are independent and identically dis-tributed (i.i.d), mutually independentE[aaH]=σ2
aIM,
and drawn from QAM or PSK constellations.
Please notice that these assumptions are not very restrictive and satisfied in BLAST scheme whose corresponding model is given in (1). Moreover, throughout this paper by QAM constellation we mean only square QAM constellation. In or-der to recover the source signals, the received signal y(n) is processed by an (N×M) receiver matrixW=[w1,. . .,wM].
Then, the receiver output can be written as
z(n)=WTy(n)=WTHa(n) +WTb(n)
=GTa(n) +b(n), (2)
wherez(n) = [z1(n),. . .,zM(n)]T is the (M×1) vector of
the receiver output,G= [g1,. . .,gM] =HTWis the (M×
M) global system matrix, andb(n) is the filtered noise at the receiver output.
The purpose of blind source separation is to find the ma-trix W such thatz(n) = a(n) is an estimate of the source signals.
Please note that in blind signals separation, the best that can be done is to determineWup to a permutation and scalar multiple [3]. In other words, W is said to be a separation matrix if and only if
GT =WTH=PΛ, (3)
wherePis a permutation matrix andΛa nonsingular diago-nal matrix.
Throughout this paper, we use small and capital boldface letters to denote vectors and matrices, respectively. The sym-bols (·)∗and (·)T denote the complex conjugate and trans-pose, respectively, (·)His the Hermitian transpose, andIpis
the (p×p) identity matrix.
3. THE PROPOSED CRITERION
4
Source signal 1
(a)
Equalizer output 1
(c)
Source signal 2
(d)
Equalizer output 2
(f)
Figure1: 16-QAM constellation. Left column: the constellations of the transmitted signals, middle column: the constellations of the received signals (mixtures), right column: the constellations of the recovered signals.
For theth equalizer, we suggest to optimize the follow-ing criterion:
by assuming a perfect equalization with respect to the zero forcing (ZF) solution, and is defined as
R=E
The term on the right side of the equality (4) prevents the deviation of the square of the real part of the equalizer outputs from a constant. The minimization of (4) allows the recovery of only one signal at each equalizer output (see proof inSection 4). But the algorithm minimization (4) does not ensure the recovery of all source signals because it may converge in order to recover the same source signal at many outputs. In order to avoid this problem, we suggest to use a cross-correlation term due to its computational simplicity. Then (4) becomes
theith equalizer outputs and prevents the extraction of the same signal at many outputs. Then the first term in (6) en-sures the recovery of only one signal at each equalizer out-put and the cross-correlation term ensures that each equal-izer output is different from the other ones; this results in the recovery of all source signals (seeSection 4). In the following sections, we name (6) the cross-correlation simplified CMA (CC-SCMA) criterion. In (6) we could also use the imaginary part thanks to the symmetry of the QAM and PSK constel-lations. Since the analysis is the same for the imaginary part, throughout this paper, we only consider the real part.
4. CONVERGENCE ANALYSIS
Theorem 1. LetMbe i.i.d. and mutually independent signals
ai(n),i = 1,. . .,M, which share the same statistical
proper-ties, are drawn from QAM or PSK constellations and are trans-mitted via an (M ×N) MIMO linear memoryless channel and without the presence of noise. Provided that the weight-ing factor α is chosen to satisfy α ≥ 2E[a4R]/σ4ad2 (where
d = 1 for QAM and P-PSK (P ≥ 8) constellations and
1.5
Source signal 1
(a)
Equalizer output 1
(c)
Source signal 2
(d)
Equalizer output 2
(f)
Figure2: 8-PSK constellation. Left column: the constellations of the transmitted signals, middle column: the constellations of the received signals (mixtures), right column: the constellations of the recovered signals.
Proof. For simplicity, the analysis is restricted to noise-free case, that is,
z(n)=GTa(n). (7)
Note that due to the assumed full column rank ofH, all re-sults in theGdomain will translate to theWdomain as well. For convenience, the stationary points study will be carried out in theGdomain [24].
Considering (7), the cross-correlation term in (6) can be simplified as output, becauseg1is optimized independently from all the other vectorsg2,. . .,gM. Hence, for the first equalizer,g1, we
By developing (10), we get (for notation convenience, in the following, we will omit the time indexn)
J(g1)=E Because the development is not the same for QAM, 4-PSK, andP-PSK (P ≥ 8) constellations, we will enumerate the proof of each case separately.
4.1. QAM case
After a straightforward development of the terms in (11) with respect to statistical properties of QAM signals (see Appendix A), (11) can be written as
1.5
Source signal 1
(a)
Equalizer output 1
(c)
Source signal 2
(d)
Equalizer output 2
(f)
Figure3: 4-PSK constellation. Left column: the constellations of the transmitted signals, middle column: the constellations of the received signals (mixtures), right column: the constellations of the recovered signals.
8000
Figure4: Performance comparison in term of SINR of the pro-posed algorithm (CC-SCMA) with CC-CMA and supervised LMS.
The minimum of (11) can be found easily by replacing the equalizer output in (12) by any of the transmitted signals, it is given by
Jminis a constant (∂Jmin/∂g∗1 =0), hence we only deal with the reminder terms. For that purpose, let us have
Jg1 nonzero and the others are zeros. Equation (23) indicates that the modulus of this entry must be equal to one (|g1|2= 1). Finally, from (24) either the real part or the imaginary part must be equal to zero. As a result of (23), the squared modulus of the nonzero part is equal to one, that is, either g2
R,1=1 andgI2,1 =0 orgR2,1=0 andgI2,1 =1. Therefore, the solutiong1is either a pure real or a pure imaginary with modulus equal to one, which corresponds to
g1=ejm1(π/2), (25)
wherem1is an arbitrary integer.
This solution shows that the minimization of J(g1) forces the equalizer output to form a constellation that corre-sponds to the source constellation with a moduloπ/2 phase rotation.
From (22), (23), (24), and (25), we can conclude that the only stable minima for g1 take the following form: g1 = [0,. . ., 0,ejm1(π/2), 0,. . ., 0]T, that is, only one entry is nonzero, pure-real, or pure-imaginary with modulus equal to one, which can be at any of theMpositions and all the other ones are zeros. This solution corresponds to the
recov-ery of only one source signal and cancels the others. For the second equalizerg2, from (9), we have this means that the adaptation ofg2depends ong1.
We examine the convergence ofg2onceg1has converged to one signal, because the adaptation ofg1is realized inde-pendently from the othergi. For the sake of simplicity, and
without loss of generality, we consider thatg1has converged to the first signal, that is,
g1= expressed as follows:
Jg2 cancel the operation result, we get
∂Jg2
By canceling both real and imaginary parts of (30), we have
gR,12=0 or χ+ 2βgI2,12=2E theorem’s condition 2E[a4
R]−ασ4ad2≤0 requires thatgR,12= 0 andgI,12=0, that is,g12=0.
Hence,g2will take the form
g2=
0|gT2 T, (32) which results in
gH
1g2=0. (33)
Therefore, (26) is reduced to
min
g2
Jg2=Ez2R,2(n)−R
2
where the second equalizer outputz2 = gT2a = gT2a, with a=[a2,. . .,aM]T.
Equation (34) has the same form as (10). Hence the analysis is exactly the same as described previously. Con-sequently, the stationary points of (34) will take the form g2=[0,. . ., 0,ejm2(π/2), 0,. . ., 0]T, which corresponds tog
2= [0 | 0,. . ., 0,ejm2(π/2), 0,. . ., 0]T. Henceg
2 will recover per-fectly a different signal than the one already recovered byg1. Without loss of generality, again, we assume that the sin-gle nonzero element ofg2 is in its second position, that is, g2=[0,ejm2(π/2), 0,. . ., 0]T.
If we continue in the same manner for eachgi, we can see
that eachgiconverges to a setting, in which zeros have the
positions of the already recovered signals and its remaining entries contain only one nonzero element; this corresponds to the recovery of a different signal, and this process contin-ues until all signals have been recovered.
On the basis of this analysis, we can conclude that the minimization of the suggested cost function in the case of QAM signals ensures a perfect recovery of all source signals and that the recovered signals correspond to the source sig-nals with a possible permutation and a modulo π/2 phase rotation.
4.2. P-PSK case(P≥8)
On the basis of the results inAppendix B, we have
Jg1
=Ea4
R
M
k=1
gk12
−1
2
+β
M
k=1
gk12
2
−
M
k=1
gk14
−Ea4R +R2.
(35)
And from (16),Jmin= −E[a4R] +R2is a constant. If we cancel
the derivatives of the first and second terms on the right side of (35), we obtain
M
k=1
gk12
=1, (36)
M
k=1,k=
gk12
=0. (37)
Therefore, (36) and (37) dictate that the solution must take the form
g1=
0,. . ., 0,ejφ, 0,. . ., 0 T, (38) whereφ ∈[0, 2π] is an arbitrary phase in theth position
ofg1which can be at any of theMpossible positions. The solutiong1has only one nonzero entry with a mod-ulus equal to one, and all the other ones are zeros. This so-lution corresponds to the recovery of only one source signal and cancels the other ones. With regard to the other vectors, the analysis is exactly the same as the one in the case of QAM signals.
Then, we can say that the minimization of the SCMA cri-terion, in the case ofP-PSK (P ≥8) signals, ensures the re-covery of all signals except for an arbitrary phase rotation for each recovered signal.
4.3. 4-PSK case
On the basis of the results found inAppendix C,J(g1) can be written as
Jg1
=E2a2
R
3
M
k=1
gk12
2
−
M
k=1
gk14
−4
M
k=1
gk12
−4
M
k=1 g2
R,k1gI2,k1
+R2.
(39)
In order to find the stationary points of (39), we cancel its derivative
∂Jg1
∂g∗1
=E2a2
R
6g1
M
k=1
gk12
−2g1g1 2
−4g1
−4gR,1gI2,1+jgR2,1gI,1
=0.
(40)
By canceling both real and imaginary parts of (40), we have
3gR,1
M
k=1
gk12
−gR,1g1 2
−2gR,1−2gR,1gI2,1=0,
3gI,1
M
k=1
gk12
−gI,1g1 2
−2gI,1−2gI,1gR2,1=0.
(41)
According to (41),
gR,1=gI,1. (42) Then (41) can be reduced to
6
M
k=1,k=
g2
R,k1+ 2gR2,1−2=0. (43)
Thus
g2
R,1= −3
M
k=1,k=
g2
R,k1+ 1. (44)
Finally, we find
g2
R,1= −3(p−1)gR2,1+ 1, (45) where 1≤p ≤Mis the number of nonzero elements ing1, which gives
g2
R,1=gI2,1=
⎧ ⎪ ⎨ ⎪ ⎩
1
(3p−2), if ∈Fp, 0, otherwise,
∀p=1,. . .,M,
(46)
Now, we study separately the stationary points for each is the global minimum.
(ii) p ≥ 2: in this case, the solutions have at least two nonzero elements in some positions ofg1. All nonzero elements have the same squared amplitude of 2/(3p−
2).
Let us consider the following perturbation:
g1=g1+e, (49)
wheree = [e1,. . .,eM]T is an (M×1) vector whose norm
e2 =eHecan be made arbitrarily small and is chosen so
that its nonzero elements are only in positions where the cor-responding elements ofg1are nonzero:
e=0⇐⇒∈Fp. (50)
Let this perturbation be orthogonal withg1, that is,eHg
1=0. Then, we have
We assume that
Using (46) in (55), and after some simplifications, we get
Jg1=Jg1
Now we consider another perturbation which takes the form
0 otherwise, (59)
30 25
20 15
10 5
SNR (dB) −30
−25 −20 −15 −10 −5
MSE
(dB)
MMSE (supervised) CC-SCMA MCC-SCMA
Figure5:MSEversusSNRof CC-SCMA, MCC-SCMA, and super-vised MMSE.
Using (36) and after some simplifications, we get
Jg1=Jg1
+ 4ξ 2
p 3p−2E
2a2
R . (61)
Therefore, we always have
Jg1
>Jg1
, ∀p∈N+∗. (62)
Hence,g1cannot be a local maximum.
Then, on the basis of (58) and (62),g1is a saddle point forp≥2.
Therefore, the only stable minima correspond top=1. We conclude that the only stable minima take the form g1 =[0,. . ., 0,cejφ, 0,. . ., 0]T, which ensure the extraction of only one source signal and cancel the other ones. For the remainder of the analysis, we proceed exactly as we did for QAM signals.
Finally, in order to conclude this section, we can say that the minimization of the cost function in (6) ensures the re-covery of all source signals in the case of source signals drawn from QAM or PSK constellations.
5. MODIFIED CROSS-CORRELATION TERM
In the previous section, we have seen that, in the case of QAM constellation, the signals are recovered with modulo π/2 phase rotation. By taking advantage of this result, we suggest to use, instead of cross-correlation term in (6), the following term:
−1
m=1 E2z
R,(n)zR,m(n) +E2
zR,(n)zI,m(n), =1,. . .,M.
(63)
Using (63) in (6), instead of the classical cross-correlation term, the criterion becomes
J(n)=EzR2,(n)−R
2
+α
−1
m=1
E2z
R,(n)zR,m(n) +E2
zR,(n)zI,m(n) ,
=1,. . .,M. (64)
Please note that in (64) the multiplications in cross-correlation terms are not complexes, as opposed to (6) which reduces complexity.
The cost function in (64) is named modified cross-correlation SCMA (MCC-SCMA).
Remark 1. The new cross-correlation term could be also used by the MMA algorithm, because it recovers QAM signals with moduloπ/2 phase rotation.
In the following section, the complexity of the modified cross-correlation term will be discussed and compared with the classical cross-correlation term.
6. IMPLEMENTATION AND COMPUTATIONAL
COMPLEXITY
6.1. Implementation
In order to implement (6) and (64), we suggest to use the classical stochastic gradient algorithm (SGA) [25]. The gen-eral form of the SGA is given by
W(n+ 1)=W(n)−1
2μ∇W(J), (65) where∇W(J) is the gradient ofJwith respect toW.
6.1.1. For CC-SCMA
The equalizer update equation at thenth iteration is written as
w(n+ 1)=w(n)−μe(n)y∗(n), =1,. . .,M, (66)
where the constant which arises from the differentiation of (6) is absorbed within the step sizeμ.e(n) is the
instanta-neous errore(n) for theth equalizer given by
e(n)=
z2
R,(n)−R
zR,(n) +α
2
−1
m=1
rm(n)zm(n), (67)
where the scalar quantityrmrepresents the estimate ofrm,
it can be recursively computed as [25]
rm(n+ 1)=λrm(n) + (1−λ)z(n)z∗m(n), (68)
whereλ∈[0, 1] is a parameter that controls the length of the effective data window in the estimation.
Please note that sinceE[rm(n)] = E[z(n)zm∗(n)], then
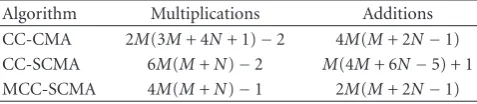
Table1: Comparison of the algorithms complexity against weight update.
Algorithm Multiplications Additions CC-CMA 2M(3M+ 4N+ 1)−2 4M(M+ 2N−1) CC-SCMA 6M(M+N)−2 M(4M+ 6N−5) + 1 MCC-SCMA 4M(M+N)−1 2M(M+ 2N−1)
6.1.2. For MCC-SCMA
We have exactly the same equation as (66), but the instanta-neous error signal of theth equalizer is given by
e(n)=
z2
R,(n)−R
zR,(n)
+α 2
−1
m=1
rRR,m(n)zR,m(n) +rRI,m(n)zI,m(n) ,
(69)
where
rRR,m(n+ 1)=λrRR,m(n) + (1−λ)zR,(n)z∗R,m(n),
rRI,m(n+ 1)=λrRI,m(n) + (1−λ)zR,(n)z∗I,m(n).
(70)
6.2. Complexity
We consider the computational complexity of (66) for one iteration and for all equalizer outputs. With
(i) for CC-SCMA,
e(n)=
zR,(n)2−R
zR,(n) +α
2
−1
m=1
rm(n)zm(n); (71)
(ii) for MCC-SCMA (modified cross-correlation SCMA),
e(n)=
zR,(n)2−R
zR,(n)
+α 2
−1
m=1
rRR,m(n)zR,m(n) +rRI,m(n)zI,m(n);
(72)
(iii) for CC-CMA (cross-correlation CMA)
e(n)=z(n)2−R
z(n) +α
2
−1
m=1
rm(n)zm(n). (73)
According toTable 1, the CC-SCMA presents a low com-plexity compared to that of CC-CMA. On a more interest-ing note, the results in Table 1show that the use of modi-fied cross-correlation term reduce significantly the complex-ity. Please note that the number of operations is per iteration.
7. NUMERICAL RESULTS
Some numerical results are now presented in order to con-firm the theoretical analysis derived in the previously
sec-tions. For that purpose, we use the signal to interference and noise ratio (SINR) defined as
SINRk=
gkk2
,=kgk
2 +wT
kRbw∗k
,
SINR= 1
M
M
k=1 SINRk,
(74)
where SINRkis the signal-to-interference and noise ratio at
thekth output.gi j =hTiwj, wherewjandhiare thejth and
ith column vector of matricesWandH, respectively.Rb =
E[bbH] = σ2
bIN is the noise covariance matrix. The source
signals are assumed to be of unit variance.
The SINR is estimated via the average of 1000 indepen-dent trials. Each estimation is based on the following model. The system inputs are independent, uniformly distributed and drawn from 16-QAM, 4-PSK, and 8-PSK constellations. We considered M transmit and N receive spatially decor-related antennas. The channel matrix H is modeled by an (N×M) matrix with independent and identically distributed (i.i.d.), complex, zero-mean, Gaussian entries. We consid-eredα = 1 (this value satisfy the theorem condition) and λ = 0.97. The variance of noise is determined according to the desired Signal-to-Noise Ratio (SNR).
Figures1,2, and3show the constellations of the source signals, the received signals, and the receiver outputs (after convergence) using the proposed algorithm for 16-QAM, 8-PSK, and 4-PSK constellations, respectively. We have consid-ered that SNR=30 dB,M=2,N=2, and thatμ=5×10−3. Please note that the constellations on Figures1,2, and3are given before the phase ambiguity is removed (this ambiguity can be solved easily by using differential decoding).
InFigure 1, we see that the algorithm recovers the 16-QAM source signals, but up to a moduloπ/2 phase rotation which may be different for each output.Figure 2shows that the 8-PSK signals are recovered with an arbitrary phase ro-tation. InFigure 3, the 4-PSK signals are recovered with a (2k+ 1)(π/4) phase rotation and an amplitude of√2. Theses results are in accordance with the theoretical analysis given inSection 4.
In order to compare the performances of CC-SCMA and CC-CMA, the same implementation is considered for both algorithms (seeSection 6). We have consideredM=2,N =
3, SNR=25 dB, and the step sizes were chosen so that the al-gorithms have sensibly the same steady-state performances. We have also used the supervised least-mean square algo-rithm (LMS) as a reference.
Figure 4represents the SINR performance plots for the proposed approach and the CC-CMA algorithm. We observe that the speed of convergence of the proposed approach is very close to that of the CC-CMA. Hence, it represents a good compromise between performance and complexity.
have almost the same behavior. So, in the case of QAM sig-nals, it is preferable to use a modified cross-correlation term because of its low complexity and of its similar performances compared to the one of the classical cross-correlation term.
8. CONCLUSION
In this paper, we have proposed a new globally convergent algorithm for the multiple-input multiple-output (MIMO) adaptive blind separation of QAM and PSK signals. The cri-terion is based on one dimension (either real or imaginary) and consists in penalizing the deviation of the real (or the imaginary) part from a constant. It was demonstrated that the proposed approach is globally convergent to a setting that recovers perfectly, in the absence of noise, all the source sig-nals. A modification for the cross-correlation constraint in the case of QAM constellation has been suggested. Our al-gorithm has shown a low computational complexity com-pared to that of CMA, especially when the modified cross-correlation constraint is used, which makes it attractive for implementation in practical applications. Simulation results have shown that the suggested algorithm has a good perfor-mance despite its lower complexity.
APPENDICES
For i.i.d. and mutually independent source signals that drawn from square QAM constellation, we have
EaR =E
Developing (A.8) and using (A.5), we have the following three cases:
(iii) otherwise: (A.8) is equal to zero.
Then
On the other hand, we have
M
Rearranging terms, we get
Jg1
R otherwise.
(B.17)
(iii) otherwise: (A.8) is equal to zero. Then
By developing the above equation as in the QAM case, we get
Jg1
C. 4-PSK CASE
For 4-PSK signals,
Ea2
R,ka2I, =
0 ifk=, E2a2
R otherwise.
(C.23)
ACKNOWLEDGMENT
The authors are grateful to the anonymous referees for their constructive critics and valuable comments.
REFERENCES
[1] G. J. Foschini, “Layered space-time architecture for wireless communication in a fading environment when using multi-element antennas,”Bell Labs Technical Journal, vol. 1, no. 2, pp. 41–59, 1996.
[2] A. Mansour, A. K. Barros, and N. Ohnishi, “Blind separation of sources: methods, assumptions and applications,” IEICE Transactions on Fundamentals of Electronics, Communications and Computer Sciences, vol. E83-A, no. 8, pp. 1498–1512, 2000. [3] A. Cichocki and S.-I. Amari,Adaptive Blind Signal and Image Processing: Learning Algorithms and Applications, John Wiley & Sons, New York, NY, USA, 2003.
[4] K. Abed-Meraim, J.-F. Cardoso, A. Y. Gorokhov, P. Loubaton, and E. Moulines, “On subspace methods for blind identifica-tion of single-input multiple-output FIR systems,”IEEE Trans-actions on Signal Processing, vol. 45, no. 1, pp. 42–55, 1997. [5] A. Gorokhov and P. Loubaton, “Blind identification of
MIMO-FIR systems: a generalized linear prediction ap-proach,”Signal Processing, vol. 73, no. 1-2, pp. 105–124, 1999. [6] J. K. Tugnait, “Identification and deconvolution of multichan-nel linear non-Gaussian processes using higher order statistics and inverse filter criteria,”IEEE Transactions on Signal Process-ing, vol. 45, no. 3, pp. 658–672, 1997.
[7] B. Hassibi and H. Vikalo, “On the sphere-decoding algorithm—II: generalizations, second-order statistics, and applications to communications,”IEEE Transactions on Signal Processing, vol. 53, no. 8, pp. 2819–2834, 2005. [8] B. Hassibi, “An efficient square-root algorithm for BLAST,” in
Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP ’00), vol. 2, pp. 737–740, Istanbul, Turkey, June 2000.
[9] Y. Sato, “A method of self-recovering equalization for mul-tilevel amplitude-modulation systems,”IEEE Transactions on Communications, vol. 23, no. 6, pp. 679–682, 1975.
[10] D. Godard, “Self-recovering equalization and carrier track-ing in two-dimensional data communication systems,”IEEE Transactions on Communications, vol. 28, no. 11, pp. 1867– 1875, 1980.
[11] J. Treichler and B. Agee, “A new approach to multipath correc-tion of constant modulus signals,”IEEE Transactions on Acous-tics, Speech, and Signal Processing, vol. 31, no. 2, pp. 459–472, 1983.
[12] M. G. Larimore and J. Treichler, “Convergence behavior of the constant modulus algorithm,” inProceedings of the IEEE In-ternational Conference on Acoustics, Speech, and Signal Process-ing (ICASSP ’83), vol. 1, pp. 13–16, Boston, Mass, USA, April 1983.
[13] J. Treichler and M. G. Larimore, “New processing techniques based on the constant modulus adaptive algorithm,” IEEE Transactions on Acoustics, Speech, and Signal Processing, vol. 33, no. 2, pp. 420–431, 1985.
[14] R. Gooch and J. Lundell, “The CM array: an adaptive beam-former for constant modulus signals,” inProceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP ’86), vol. 11, pp. 2523–2526, Tokyo, Japan, April 1986.
[15] L. Castedo, C. J. Escudero, and A. Dapena, “A blind signal sep-aration method for multiuser communications,”IEEE Trans-actions on Signal Processing, vol. 45, no. 5, pp. 1343–1348, 1997.
[16] C. B. Papadias and A. J. Paulraj, “A constant modulus al-gorithm for multiuser signal separation in presence of delay spread using antenna arrays,”IEEE Signal Processing Letters, vol. 4, no. 6, pp. 178–181, 1997.
[17] K. N. Oh and Y. O. Chin, “Modified constant modulus al-gorithm: blind equalization and carrier phase recovery algo-rithm,” inProceedings of the IEEE International Conference on Communications (ICC ’95), vol. 1, pp. 498–502, Seattle, Wash, USA, June 1995.
[18] J. Yang, J.-J. Werner, and G. A. Dumont, “The multimodulus blind equalization and its generalized algorithms,”IEEE Jour-nal on Selected Areas in Communications, vol. 20, no. 5, pp. 997–1015, 2002.
[19] L. M. Garth, J. Yang, and J.-J. Werner, “Blind equalization al-gorithms for dual-mode CAP-QAM reception,”IEEE Transac-tions on CommunicaTransac-tions, vol. 49, no. 3, pp. 455–466, 2001. [20] P. Sansrimahachai, D. B. Ward, and A. G. Constantinides,
“Blind source separation for BLAST,” inProceedings of the 14th International Conference on Digital Signal Processing (DSP ’02), vol. 1, pp. 139–142, Santorini, Greece, July 2002.
[21] A. Goupil and J. Palicot, “Constant norm algorithms class,” inproceedings of the 11th European Signal Processing Confer-ence (EUSIPCO ’02), vol. 1, pp. 641–644, Toulouse, France, September 2002.
[22] A. Ikhlef, D. Le Guennec, and J. Palicot, “Constant norm al-gorithms for MIMO communication systems,” inProceedings of the 13th European Signal Processing Conference (EUSIPCO ’05), Antalya, Turkey, September 2005.
[23] A. Ikhlef and D. Le Guennec, “Blind recovery of MIMO QAM signals : a criterion with its convergence analysis,” in Proceed-ings of the 14th European Signal Processing Conference (EU-SIPCO ’06), Florence, Italy, September 2006.
[24] C. B. Papadias, “Globally convergent blind source separation based on a multiuser kurtosis maximization criterion,”IEEE Transactions on Signal Processing, vol. 48, no. 12, pp. 3508– 3519, 2000.